








Schauen Sie sich diesen DIY Arduino-angetriebenen Metalldetektorroboter an
Dieser ferngesteuerte Arduino-Roboter mit Metalldetektion ist legitim.
Wenn der Videoplayer nicht funktioniert, können Sie darauf klicken. alternativer Videolink .
Jeder liebt Metalldetektion . Wenn Sie es jedoch mit ferngesteuerten Robotern kombinieren, wird die Erfahrung auf ein ganz neues Niveau gebracht.
Lesen Sie weiter, um herauszufinden, wie Sie eine für sich selbst bauen können!
Wie die meisten Projekte von dieser Art benötigen Sie einige grundlegende Werkzeuge unten aufgeführt und einige andere Komponenten.
Wir haben Links zu einigen Produkten hinzugefügt, falls Sie diese kaufen müssen :
Hauptkomponenten :
- 2 Nr. Arduino RF Nano
- 2 Nr. 1,2-A-Gleichstrommotortreiber TB6612FNG
- 4 Nr. TT-Getriebemotor
- 4 Nr. Gummiräder
- 1 Nr. Metalldetektormodul
- 2 Nr. Joystick-Modul
- 1 Nr. 1602 I2C LCD-ANZEIGE
- 4 Nr. 18650 Li-Ionen-Akku
- 2 Nr. 18650 Batteriehalter
- 3 Nr. Schraubklemme
- Verschiedene 3D-Teile. Die Modelle für diese sind erhältlich bei Thingiverse .
- Benutzerdefiniert Leiterplatte .
- Verschiedene Schrauben und Muttern.
Andere Ausrüstung benötigt :
- Lötkit
- Schraubendrehersatz
- Elektrische Drähte und Lötgeräte .
- Verschiedene Leiterplatten Kabelbuchsen und Stecker .
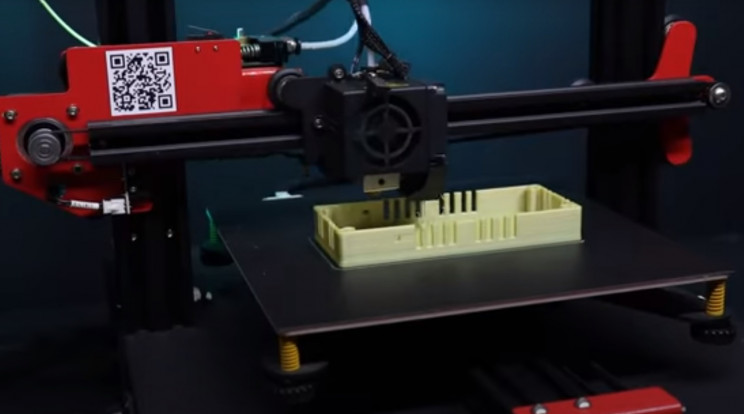
Nachdem Sie alles zusammengestellt / bestellt haben, was Sie benötigen, müssen Sie zunächst alle erforderlichen 3D-gedruckten Teile drucken. Sie finden die Teilemodelle. hier .
Der Ersteller hat eine verwendet Anet ET4 3D-Drucker aber Sie können jeden verwenden 3D-Drucker kann gedruckt werden.
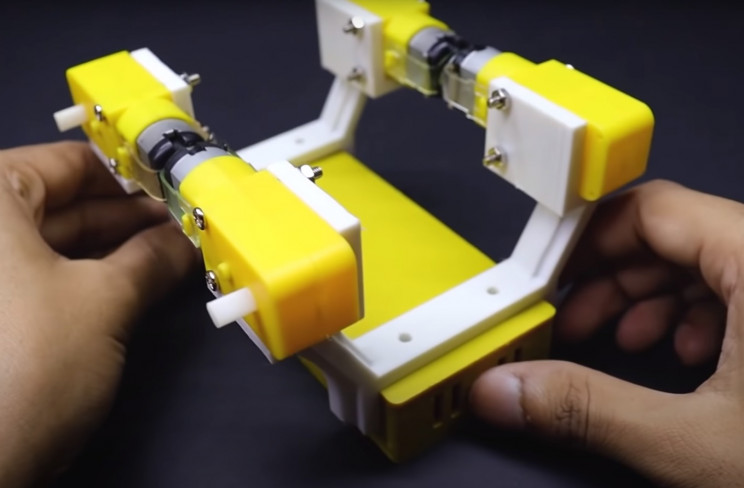
Nehmen Sie als Nächstes die TT-Getriebemotoren und schrauben Sie sie an die richtigen 3D-gedruckten Komponentenhalterungen. Sie verwenden alle vier sowie zwei spiegelbildliche 3D-Halterungen.
Weitere Informationen zu den zu verwendenden Teilen finden Sie im Video.

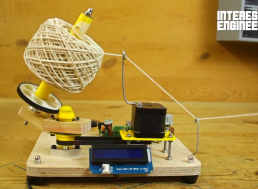
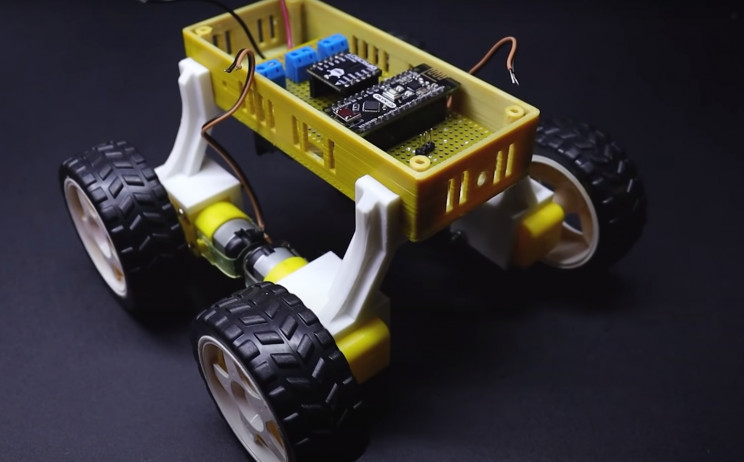
Montieren Sie die TT-Zahnräder und Halterungen am Hauptkastenboden.
Nehmen Sie als nächstes die Gummiräder und montieren Sie sie an den TT-Zahnrädern.
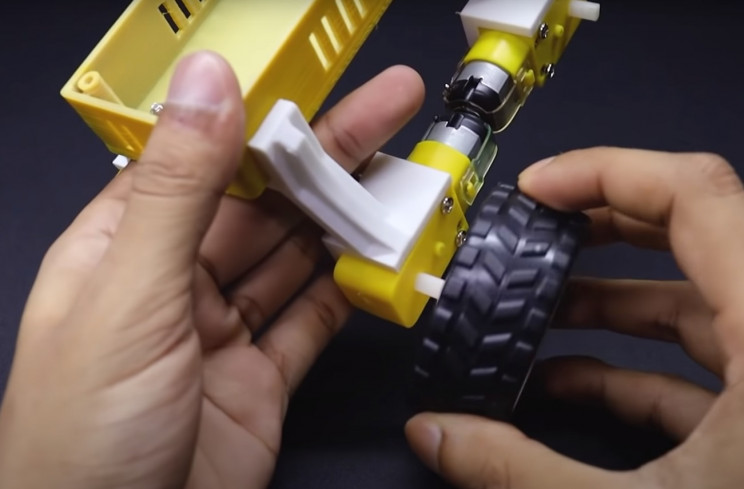
Verdrahten Sie anschließend die Motoren wie im Video gezeigt. Drehen Sie den Roboter nach Abschluss dieser Phase um.
Nehmen Sie nun den Batteriehalter und montieren Sie ihn in der Mitte des Robotergehäuses.
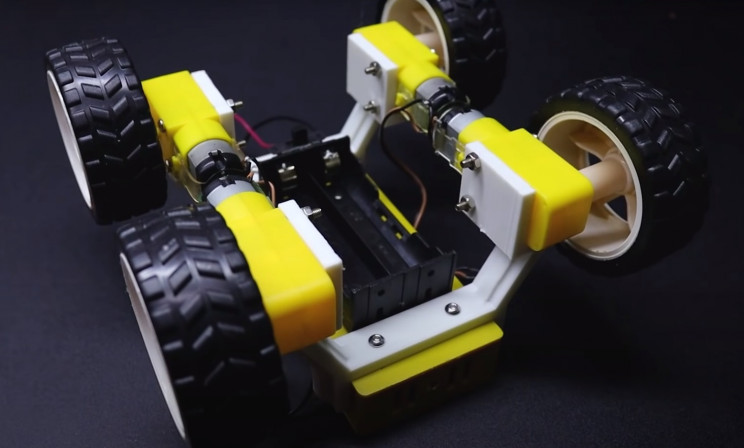
Da die meisten mechanischen Teile sortiert sind, ist es jetzt an der Zeit, unsere Aufmerksamkeit auf die mikroelektrischen Gubbins zu lenken.
Hier sind die Schaltpläne.
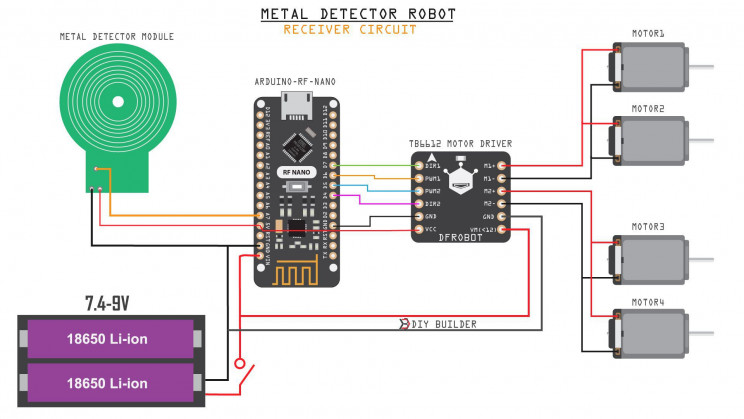
Bauen Sie die Leiterplatte wie gezeigt mit den erforderlichen Komponenten zusammen. Setzen Sie dann den Arduino RF Nano und den Gleichstrommotortreiber auf die Platine ein.
Legen Sie die fertige Leiterplatte wie im Video gezeigt in den Bauch des Roboters. Verdrahten Sie anschließend wie gezeigt.
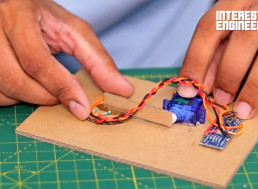
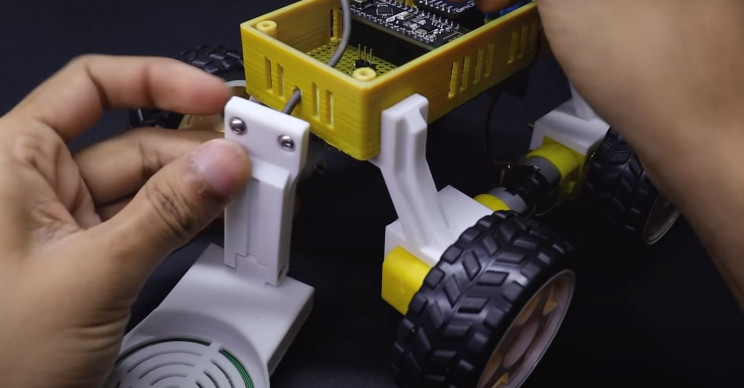
Nehmen Sie als Nächstes das Metalldetektormodul. Verdrahten Sie es und löten Sie es wie angegeben. Befestigen Sie das Metalldetektormodul an der entsprechenden 3D-gedruckten Halterung sowie am Positionierarm.
Befestigen Sie die gesamte Metallerkennungsbaugruppe wie gezeigt an der Vorderseite der Hauptroboterbaugruppe.
Verdrahten Sie mit der zuvor fertiggestellten Leiterplatte. Laden Sie nun den Code auf den Arduino RF Nano hoch.
Der Code ist ziemlich lang, daher haben wir ihn am Ende dieser Bedienungsanleitung beigefügt. Es gibt zwei Codesätze, einen für die Fernbedienung und einen für den Roboter.
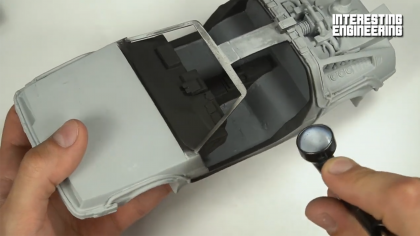
Stellen Sie sicher, dass Sie den RX-Code in das Arduino des Roboters laden. Sehen Sie sich das Video für weitere Details an. Setzen Sie nun den Deckel auf den Roboter und wir haben die Hälfte des Projekts abgeschlossen mehr oder weniger.
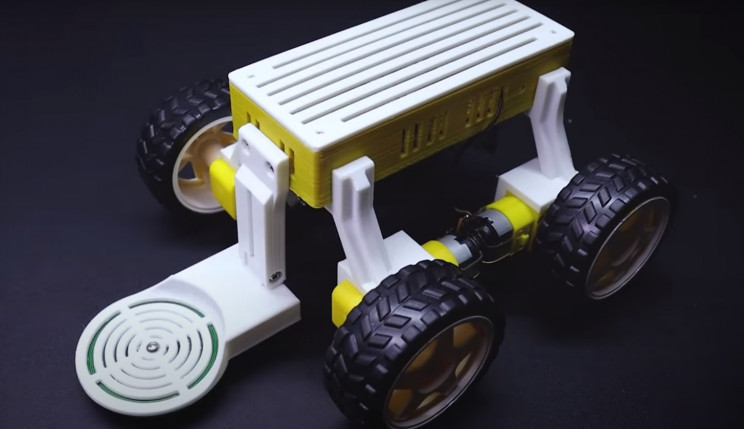
Legen Sie zwei der Batterien in den Batteriehalter ein und der Roboter ist betriebsbereit.
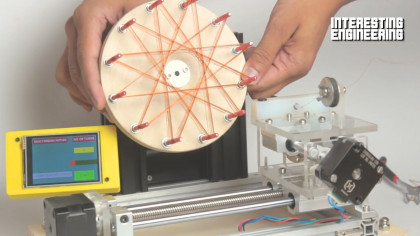
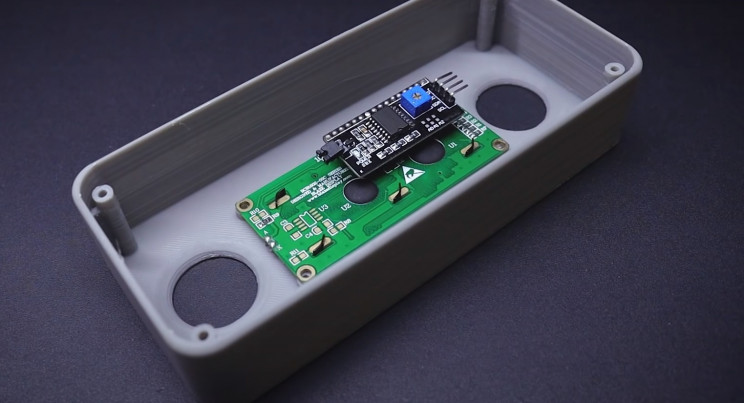
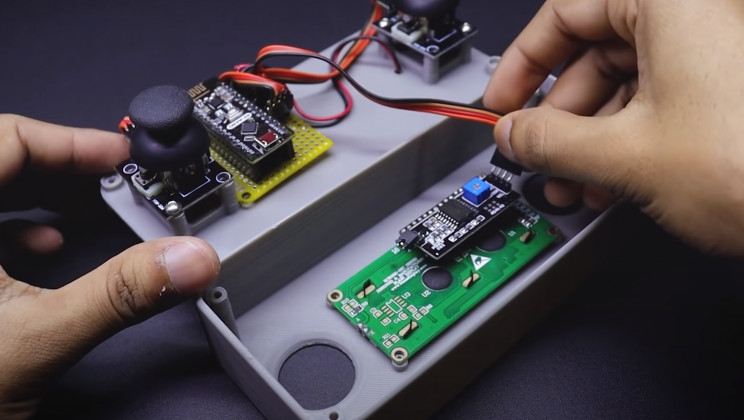
Jetzt ist es Zeit, die Fernbedienung zu bauen. Nehmen Sie das LCD-Display und montieren Sie es an der Vorderseite der Fernbedienung.
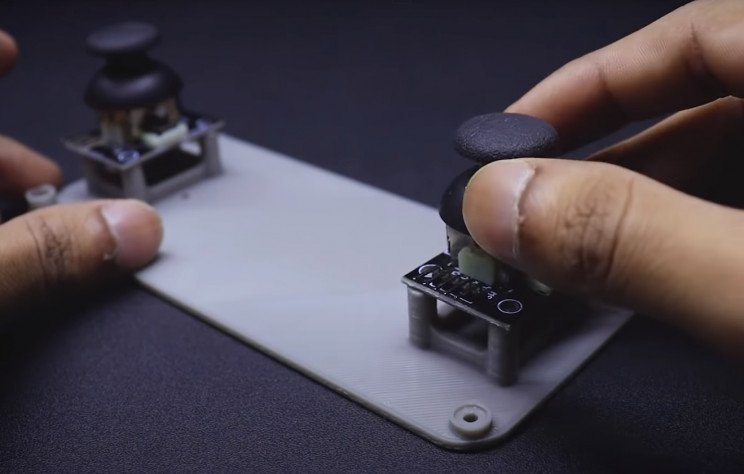
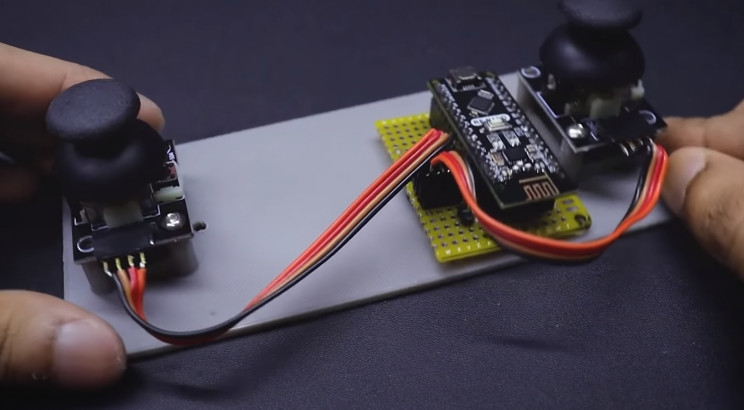
Nehmen Sie nun die Joystickmodule und montieren Sie sie auf der Rückplatte der Fernbedienung. Schrauben Sie sie fest.
Als nächstes ist es Zeit, die Hauptplatine für die Fernbedienung zu bauen. Hier ist der Schaltplan.
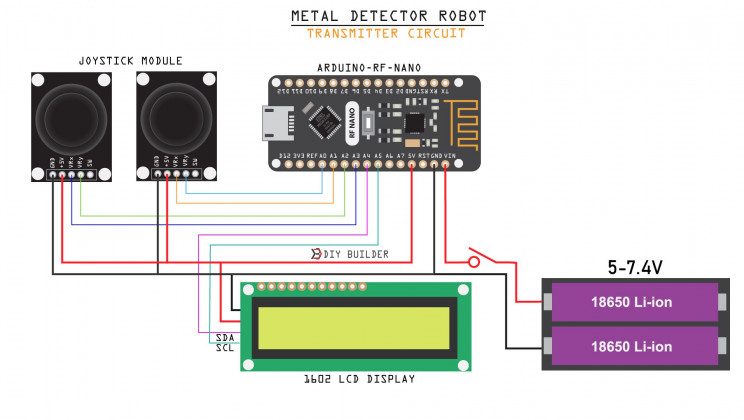
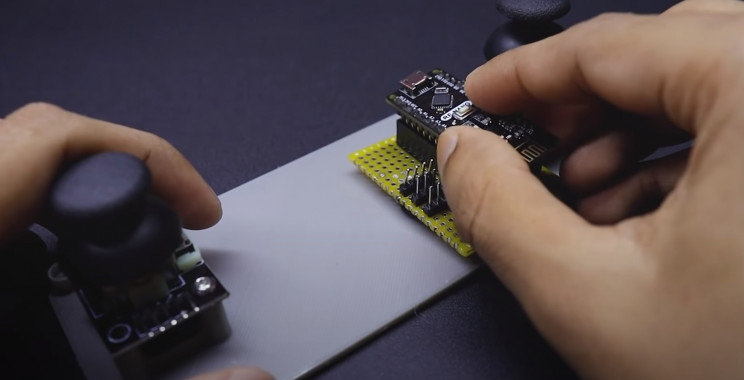
Nach Anweisung zusammenbauen und gegebenenfalls Komponenten einlöten. Die zweite Arduino-HF-Platine auf der Leiterplatte montieren und auf der Rückseite des 3D-Druckstücks der Fernbedienung anbringen.
Verdrahten Sie die Joysticks wie im Video gezeigt mit der Platine.
Nehmen Sie als Nächstes den zweiten Batteriehalter und befestigen Sie ihn an der Rückseite der hinteren Platte der Fernbedienung. Führen Sie die Kabel durch und schließen Sie sie wie gezeigt an die Hauptplatine der Fernbedienung an.
Verbinden Sie nun den LCD-Bildschirm mit der Hauptfernbedienungsplatine.
Laden Sie nun die zweite .ino-Datei auf die Arduino-Karte der Fernbedienung. Dies sollte nur die TX-Datei sein. Den vollständigen Code finden Sie am Ende dieser Bedienungsanleitung.
Stellen Sie sicher, dass Sie auch die erforderlichen Bibliotheken installieren.
Wenn dies abgeschlossen ist, bauen Sie die Fernbedienung vollständig zusammen.

Stecken Sie das zweite Batteriepaar in die Fernbedienung, und diese Phase ist ebenfalls abgeschlossen.
Sie können jetzt die Fernbedienung und den Roboter einschalten und nach Herzenslust nach Metall suchen.

Wie versprochen ist hier der Code, den Sie benötigen. Wenn Sie mit dem Code basteln möchten, stellen Sie sicher, dass Sie zuerst saubere Backups erstellen oder natürlich erneut herunterladen.
Code für den Metalldetektor speichern und als Metal_Detector_RX.ino hochladen oder von herunterladen hier
// Arduino Metal Detector Robot // Empfänger Sktech // Erstellt von DIY Builder // Kontaktieren Sie mich https://www.instagram.com/diy.builder/ // Bevor Sie die Skizze hochladen, müssen Sie die erforderlichen Bibliotheken installieren // Gehen Sie zuerst zum Skizzenabschnitt >> Bibliothek einschließen >> Bibliotheken verwalten >> RF24 und LiquidCrystal verwalten >> Installieren >> Fertig #include #include #include #define sensor A7 int PWM1 = 6; int DIR1 = 7; int PWM2 =5; int DIR2 = 4; int sensorValue = 0; vorzeichenlose lange lastReceiveTime = 0; vorzeichenlose lange aktuelle Zeit = 0; RF24-Funk 10,9; konstante Byteadresse [6] = "00001"; konstante Byteadresse1 [6] ="00003"; struct Data_Package {Byte x1Value; Byte y1Value; Byte x2Value; Byte y2Value; Byte sValue;}; Data_Package-Daten; void setup {Serial.begin 9600; PinMode DIR1, OUTPUT; PinMode DIR2,OUTPUT; pinMode Sensor, INPUT; radio.begin ; radio.openReadingPipe 1, Adresse; radio.openWritingPipe Adresse1; radio.setPALevel RF24_PA_HIGH; resetData ;} void loop {radio.startListening ; if radio.available {radio.read & data, sizeof Data_Package;lastReceiveTime = millis ;} currentTime = millis ;if currentTime - lastReceiveTime> 1000 {resetData ;} Serial.print "j1PotX:";Serial.println data.x1Value;Serial.print "j1PotY:";Serial.println data.y1Value;if data.y1Value> 200 {analogWrite PWM1, 100;analogWrite PWM2, 100;digitalWrite DIR1, HIGH;digitalWrite DIR2, HIGH;} else if data.y1Value <100 {analogWrite PWM1, 100;analogWrite PWM2, 100;digitalWrite DIR1, LOW;digitalWrite DIR2, LOW;} else if data.x1Value> 200 {analogWrite PWM1, 100;analogWrite PWM2, 100;digitalWrite DIR1, LOW;digitalWrite DIR2, HIGH;} else if data.x1Value <100 {analogWrite PWM1, 100;analogWrite PWM2, 100;digitalWrite DIR1, HIGH;digitalWrite DIR2, LOW;} else if data.y2Value> 200 {analogWrite PWM1, 255;analogWrite PWM2, 255;digitalWrite DIR1, HIGH;digitalWrite DIR2, HIGH;} else if data.y2Value <100 {analogWrite PWM1, 255;analogWrite PWM2, 255;digitalWrite DIR1, LOW;digitalWrite DIR2, LOW;} else if data.x2Value> 200 {analogWrite PWM1, 255;analogWrite PWM2, 255;digitalWrite DIR1, LOW;digitalWrite DIR2, HIGH;} else if data.x2Value <100 {analogWrite PWM1, 255;analogWrite PWM2, 255;digitalWrite DIR1, HIGH;digitalWrite DIR2, LOW;} else {analogWrite PWM1, 0;analogWrite PWM2, 0;} delay 5;radio.stopListening ;sensorValue = analogRead Sensor;data.sValue = sensorValue;Serial.print "Sensor";Serial.println sensorValue;radio.write & data, sizeof Data_Package;Verzögerung 5;} void resetData {data.x1Value = 127;data.y1Value = 127;data.x2Value = 127;data.y2Value = 127;data.sValue = 0;}
Code für den Metalldetektor speichern und als Metal_Detector_TX.ino hochladen oder von herunterladen hier
// Arduino-Metalldetektionsroboter // Senderskizze // Erstellt von DIY Builder // Kontaktieren Sie mich https://www.instagram.com/diy.builder/ // Bevor Sie die Skizze hochladen, müssen Sie die erforderlichen Bibliotheken installieren // Gehen Sie zuerst zum Skizzenabschnitt >> Bibliothek einschließen >> Bibliotheken verwalten >> RF24 und LiquidCrystal verwalten >> Installieren >> Fertig #include #include #include #include #include LiquidCrystal_I2C lcd 0x3F, 20, 4; RF24 radio 10,9; const Byteadresse [6] = "00001"; const Byteadresse1 [6] = "00003"; struct Data_Package {Byte x1Value; Byte y1Value; Byte x2Value; Byte y2Value; Byte sValue;}; Data_Package-Daten;void setup {Serial.begin 9600; lcd.init ; lcd.backlight ; radio.begin ; radio.openWritingPipe Adresse; radio.openReadingPipe 1, Adresse1; radio.setPALevel RF24_PA_HIGH;} void loop {delay 5; radio.stopListening ; Serial.print "x1Value"; Serial.println data.x1Value; Serial.print "y1Value"; Serial.printlndata.y1Value; Serial.print "x2Value"; Serial.print data.x2Value;Serial.print "y2Value";Serial.print data.y2Value;data.y1Value = map analogRead A0, 0, 1023, 0, 255;data.x1Value = map analogRead A1, 0, 1023, 0, 255;data.y2Value = map analogRead A2, 0, 1023, 0, 255;data.x2Value = map analogRead A3, 0, 1023, 0, 255;radio.write & data, sizeof Data_Package;Verzögerung 5;radio.startListening ;if radio.available {radio.read & data, sizeof Data_Package;int sensor = data.sValue;Serial.print "button";Serial.println Sensor;lcd.setCursor 0,0;lcd.print "Robot Connected";if Sensor <200 {lcd.setCursor 0,1;lcd.print "Metal Searching";} else {lcd.setCursor 0,1;lcd.print "Metal Found";}} else {lcd.setCursor 0,0;lcd.print "Hallo Welt!";lcd.setCursor 0,1;lcd.print "Robot Disconnected";}}Interessante Technik | wissenschaft-x.com ist Teilnehmer des Amazon Services LLC-Partnerprogramms und verschiedener anderer Partnerprogramme. Daher gibt es möglicherweise Partnerlinks zu den Produkten in diesem Artikel. Klicken Sie auf die Links und kaufen Sie auf Partnerseiten einSie erhalten nicht nur die Materialien, die Sie benötigen, sondern unterstützen auch unsere Website.