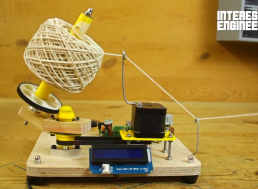




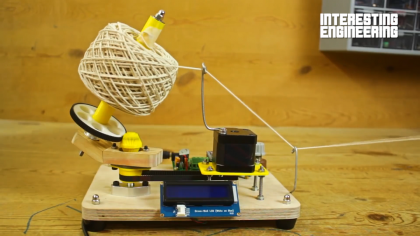


Bauen Sie Ihre eigene Rodin-Spulenwickelmaschine auf Arduino-Basis
Benötigen Sie einen Kupferdraht, der mit Rodin gewickelt ist? Dann macht diese Maschine Ihren Tag.
Wenn der Videoplayer nicht funktioniert, können Sie darauf klicken. Alternative Videolink .
Wenn Sie Kupferdraht benötigen Rodin-gewickelt Sie können immer Stunden damit verbringen, dies von Hand zu tun. Alternativ können Sie einige grundlegende Komponenten verwenden und eine Arduino Nano damit eine Maschine das für Sie erledigt.
Was gibt es nicht zu mögen?

Aber zuerst benötigen Sie einige Teile und Ausrüstung, bevor Sie stecken bleiben.
Werkzeuge und Teile benötigt
- Arduino Nano
- NEMA 17 Schrittmotor
- A4988-Schrittmotortreibermodul
- Nextion 2,8 "HMI-LCD-Bildschirm
- 6 mm Acrylplatte klar
- 12 mm dickes Sperrholz oder MDF-Platte
- 23/32 x 23/32 Zoll 20 x 20 mm Aluminium-Extrusionsstab
- 23/32 x 1 und 20/40 mm 37/64 Zoll Aluminium-Extrusionsstab
- 20 mm Stahlstange
- Klammern
- M5-Gewindestangen
- Benutzerdefinierte Leiterplatte oder verwenden Sie einfach eine Sandwichplatine und eine Anschlussverkabelung.
- Stahlstangen
- Spule aus dünnem Kupferdraht
- Alter Plastikkugelschreiber
- Acrylblock
- Hohlmetallzylinder
- 8 mm Flanschlager
- 5 mm 13/64 Zoll Gewindestange s
- Lötkit
- Schlauchschrumpffolie
- Schraubendrehersatz
- Minidrehmaschine
- Elektrische Drähte, Widerstände und Lötgeräte
- Verschiedene Leiterplatten Kabelbuchsen und Stecker
- Winkelmesser und Kompass
- Ein 3D-Drucker oder bitten Sie einen Freund mit einem um Hilfe
- Verschiedene 3D-Teile Modelle hier
- Arduino Code finden Sie am Ende des Artikels
- Benutzerdefiniert Leiterplatte
- Tischkreissäge
- Stichsäge
- Verschiedene Schrauben und Muttern
Schritt 1: Erstellen Sie den Grundrahmen
Der erste Schritt besteht darin, den Grundrahmen für die Rodin-Spulenwickelmaschine zu erstellen. Greifen Sie dazu nach Ihren Extrusionsstraßen, messen Sie sie und schneiden Sie sie zu. Messen Sie 4 gleiche Längen von 20 cm 7 und 7/8 Zoll.und mit einer Tischkreissäge oder Hackensäge schneiden.

Erstellen Sie mit Ihren Klammern den Grundrahmen wie unten gezeigt.

Nehmen Sie nun die beiden doppelt dicken Extrusionsstangen und befestigen Sie diese ebenfalls mit Halterungen am Rahmen.

Schritt 2: Erstellen Sie das Rodin-Wickler-Montagerad
Nehmen Sie nun Ihr Sperrholz oder MDF und schneiden Sie ein quadratisches Stück mit geeigneter Größe aus, das groß genug für den Durchmesser des Rodin-Wicklerrads ist. Markieren Sie die Mitte und zeichnen Sie mit einem Kompass einen Kreis.

Markieren Sie mit einem Winkelmesser alle 4 cm entlang des Umfangs Intervalle für die Positionen des Rodin-Wicklers. Sie benötigen insgesamt 16 Punkte.

Schneiden Sie das Rad mit einer Stichsäge aus und reinigen Sie die Schnittkanten nach Bedarf. Bohren Sie ein Loch durch die Mitte und bohren Sie auch Löcher durch jeden Punkt um den Radumfang.
Montieren Sie das Rad bei Bedarf in einer Drehmaschine und schneiden Sie die Kanten auf die erforderlichen Abmessungen ab.

Schritt 3: Montieren Sie das Rad
Nehmen Sie Ihre Stahlstange und markieren Sie eine Länge von ca. 2 und 6 cm. Schneiden Sie die Länge mit einem Dremel oder einer Bügelsäge ab. Befestigen Sie die Länge in Ihrer Minidrehmaschine und bearbeiten Sie eine Achse, um die Stange zu haltenWickelrad.
Bohren Sie ein Loch durch die Mitte der Achse mit dem gleichen Durchmesser wie die Achse des NEMA-Schrittmotors. Drehen Sie anschließend die Länge der Achse um und schneiden Sie den Rest des Stangenabschnitts mit vollem Durchmesser ab, um einen Flansch zu hinterlassenungefähr 5 mm tief.
Bearbeiten Sie das abgeschnittene Ende flach und bohren Sie dann wie gezeigt zwei Löcher über den gesamten Durchmesser.

Setzen Sie Ihre Montageachse in die Radmitte ein und befestigen Sie beide an der Achse des Schrittmotors.

Ziehen Sie als nächstes die Löcher von der Radbefestigungsachse in das Rad hinein und schrauben Sie sie fest zusammen.
Schritt 4: Montageplatte des Plexiglas-Schrittmotors herstellen
Nehmen Sie als Nächstes Ihr klares Plexiglas und messen Sie eine Länge von 5 und 14 cm 33/64 Zoll mal 1 und 5 cm 31/32 Zoll. Schneiden Sie es mit Ihrer Stichsäge aus.
Suchen Sie die Mitte des Teils und markieren Sie die Befestigungsschraubenpunkte für die NEMA-Schrittmotor-Befestigungspunkte sowie vier Eckschraubenlöcher. Bohren Sie die Löcher und schneiden Sie ein weiteres größeres Loch in die Mitte.

Montieren Sie das Stück geformten Plexiglas oben auf den doppelt breiten extrudierten Stangen an Ihrem zuvor fertiggestellten Rahmen.

Als nächstes montieren Sie den Schrittmotor mit geeigneten Schrauben und Muttern an der Plexiglasplatte.
Schritt 6: Vervollständigen Sie das Rad
Nehmen Sie nun 12 1, 4 und 4 cm lange Schrauben mit dem gleichen Durchmesser wie die Umfangslöcher Ihres Rodin-Wickelrads. Befestigen Sie sie mit Unterlegscheiben und Schrauben in den Löchern.

Fügen Sie als Nächstes jedem der Bolzenzähne am Rad eine Schrumpffolie hinzu. Verwenden Sie einen Haartrockner, um sie bei Bedarf zu erwärmen.
Befestigen Sie das Rad an der Schrittmotorbefestigung am Mainframe.

Schritt 7: Hauptwicklungsmechanismus herstellen
Nehmen Sie jetzt zwei Längen von 8 mm 5/16 Zoll Stahlstangen und 4 Flanschhalterungen. Befestigen Sie die Halterungen wie unten gezeigt am Rahmen.

Nehmen Sie als nächstes ein weiteres Stück Plexiglas und CNC-Maschine zwei Endplatten, um den zweiten Schrittmotor zu montieren, und halten Sie die Gewindestange, die vom Schrittmotor gesteuert wird, am Rahmen fest.
Montieren Sie den Schrittmotor an seiner Plexiglashalterung. Führen Sie nun die Gewindestange durch die Plexiglas-Endplatte und befestigen Sie sie am zweiten Schrittmotor.

Nehmen Sie als Nächstes mehr Plexiglas, Schrauben und Muttern, Stahlstangen, Flansche und Ihren dritten Schrittmotor und bauen Sie den Hauptwicklungskopf. Für keines der Elemente sind Abmessungen angegeben, daher müssen Sie es nach Gehör spielen, wennGebäude das unten.

Schritt 8: Bauen Sie den Drahtvorschub und den Führungsstift auf
Nehmen Sie als nächstes einen alten Kugelschreiber, ein Stück eines schmalen Hohlzylinders, einen Kunststoffschlauch und einen Acrylblock und stellen Sie die Hauptdüse für die Rodin-Drahtzufuhr wie unten gezeigt her. Dies wird verwendet, um den Draht um die Stifte herum zu führen und zu führendas Hauptrad.

Befestigen Sie anschließend den Acrylblock an der oberen Platte des Wickelkopfs und stellen Sie mit einigen Unterlegscheiben und Filzkissen einen gepolsterten Drahtvorschub her.
Damit sind die wichtigsten mechanischen Teile fertig.
Schritt 9: Aufbau der Mikroelektronik
Nehmen Sie als Nächstes Ihre benutzerdefinierte Leiterplatte und die mikroelektronischen Komponenten. Montieren und sammeln Sie alle benötigten Teile und löten Sie sie wie unten gezeigt an Ort und Stelle.

Setzen Sie außerdem die Arduino Nano- und Schrittmotortreibermodule in die entsprechenden Steckplätze ein.

Nehmen Sie als Nächstes den LCD-Bildschirm und montieren Sie ihn in seinem 3D-gedruckten Gehäuse. Führen Sie die Drähte durch die Rückseite und führen Sie sie nach Bedarf zur Hauptplatine.
Montieren Sie die Platine an der Rückseite des doppelt breiten Extruderstangenabschnitts des Rahmens. Montieren Sie den LCD-Bildschirm mit einer normalen Metallhalterung am Rahmen.

Verdrahten Sie anschließend auch alle Schrittmotoren mit der Leiterplatte.

Laden Sie den Code auch in den Nano hoch. Dies finden Sie am Ende der Anleitung.
Schritt 10: Führen Sie etwas Kupferdraht in die Maschine ein und zünden Sie sie an.
Führen Sie anschließend nach Bedarf Kupferdraht durch die Wickelmaschine.

Befestigen Sie das freie Ende des Drahtes an einem der Stifte am Wickelrad, um den Wickelvorgang vorzubereiten.

Schalten Sie zum Schluss die Elektronik ein, geben Sie die erforderlichen Einstellungen ein und lassen Sie die Wickelmaschine ihre Sache machen. Jetzt müssen Sie sich nur noch zurücklehnen und die Belohnungen Ihrer Arbeit genießen.
Arduino-Code
Wie versprochen, hier ist die Arduino-Code vollständig. Kopieren Sie es und laden Sie es vollständig auf Ihren Nano hoch.
#include
#include "BasicStepperDriver.h"
#include "MultiDriver.h"
#include "SyncDriver.h"
#define MOTOR_STEPS 200
#define MOTOR_X_RPM 30
#define MOTOR_Y_RPM 300
#define MOTOR_Z_RPM 30
#define STEP_X 2
#define STEP_Y 3
#define STEP_Z 4
#define DIR_X 5
#define DIR_Y 6
#define DIR_Z 7
# DE 8 definieren
int Wait = 500;
int state = 0;
int val = 0;
int flag = 0;
// Wenn der Mikroschritt extern eingestellt ist, stellen Sie sicher, dass dieser mit dem ausgewählten Modus übereinstimmt.
// 1 = voller Schritt, 2 = halber Schritt usw.
#MICROSTEPS 8 definieren
// 2-Draht-Grundkonfiguration, Mikroschritt ist am Treiber fest verdrahtet
// Andere Treiber können gemischt und abgeglichen werden, müssen jedoch einzeln konfiguriert werden.
BasicStepperDriver stepperX MOTOR_STEPS, DIR_X, STEP_X;
BasicStepperDriver stepperY MOTOR_STEPS, DIR_Y, STEP_Y;
BasicStepperDriver stepperZ MOTOR_STEPS, DIR_Z, STEP_Z;
// Wählen Sie einen der beiden folgenden Controller aus
// jeder Motor bewegt sich unabhängig, die Flugbahn ist ein Hockeyschläger
MultiDriver-Controller stepperX, stepperY, stepperZ;
// ODER
// synchronisierte Bewegung, Flugbahn ist eine gerade Linie
// SyncDriver-Controller stepperX, stepperY;
void setup {
stepperX.begin MOTOR_X_RPM, MICROSTEPS;
stepperY.begin MOTOR_Y_RPM, MICROSTEPS;
stepperZ.begin MOTOR_Z_RPM, MICROSTEPS;
PinMode EN, OUTPUT;
digitalWrite EN, LOW;
stepperX.rotate -18,8;
Verzögerung 500;
Serial.begin 9600;
}
void loop {
if Serial.available > 0 {
Flag = 1;
Verzögerung 500
}
if flag == 1 {
if state <4 {
stepperY.move 14700;
Verzögerung Warten;
stepperX.rotate 60;
Verzögerung Warten;
stepperY.move -14700;
Verzögerung Warten;
stepperX.rotate -191,2;
Verzögerung Warten;
stepperY.move -14700;
Verzögerung Warten;
stepperX.rotate 60;
Verzögerung Warten;
stepperY.move 14700;
Verzögerung Warten;
stepperX.rotate -48,8;
Verzögerung Warten;
Zustand ++;
}
if state == 4 {
stepperY.move 14700;
Verzögerung Warten;
stepperX.rotate 60;
Verzögerung Warten;
stepperY.move -14700;
Verzögerung Warten;
stepperX.rotate -191,2;
Verzögerung Warten;
stepperY.move -14700;
Verzögerung Warten;
stepperX.rotate 60;
Verzögerung Warten;
stepperY.move 14700;
Verzögerung Warten;
stepperX.rotate -48,8;
Verzögerung Warten;
stepperY.move 14700;
Verzögerung Warten;
stepperX.rotate 60;
Verzögerung Warten;
stepperY.move -14700;
Verzögerung Warten;
stepperX.rotate -191,2;
Verzögerung Warten;
stepperZ.rotate 20;
Verzögerung Warten;
stepperY.move -14700;
Verzögerung Warten;
stepperX.rotate 60;
Verzögerung Warten;
stepperY.move 14700;
Zustand = 0;
}
}
}
Interessante Technik | wissenschaft-x.com ist Teilnehmer des Amazon Services LLC-Partnerprogramms und verschiedener anderer Partnerprogramme. Daher gibt es möglicherweise Partnerlinks zu den Produkten in diesem Artikel. Klicken Sie auf die Links und kaufen Sie auf Partnerseiten einSie erhalten nicht nur die Materialien, die Sie benötigen, sondern unterstützen auch unsere Website.