





So bauen Sie Ihre eigene DIY-Flechtmaschine auf Arduino-Basis
Mit ein paar Kleinigkeiten können auch Sie Ihre eigene DIY-Flechtmaschine auf Arduino-Basis herstellen.
Wenn der Videoplayer nicht funktioniert, können Sie darauf klicken. alternativer Videolink .
Sind Sie ein begeisterter Stricker oder kennen Sie jemanden, der es ist? Möchten Sie eine Maschine herstellen, mit der Sie Ihren eigenen dreifarbigen oder mehr geflochtenen Faden individuell weben können?
Vielleicht basteln Sie zufällig auch gerne an Arduino-Geräten herum. Wenn ja, dann an diesem Arduino DIY-Flechtmaschine auf Basis ist genau das Richtige für Sie.
Wie bei den meisten Projekten dieser Art benötigen Sie einige grundlegende Tools siehe unten und einige andere Kleinigkeiten, um die Arbeit zu erledigen.
Wir haben Links zu einigen Produkten hinzugefügt, falls Sie diese kaufen müssen :
Hauptkomponenten :
- 12 mm dickes Holz oder MDF-Platte
- 1/4 Zoll 4 oder 5 mm dickes Sperrholz
- Verschiedene 3D-gedruckte Zahnräder und Wollspulen usw.
- 3 Nr. 626 zz Kugellager
- 2 Nr. NEMA 17 Schrittmotor
- 1 Nr. NEMA 17 Schrittmotor-Montagehalterung
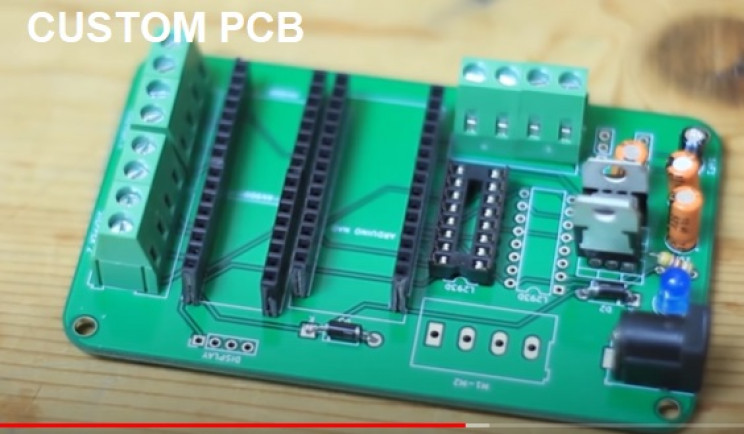
- 1 Nr. benutzerdefinierte Leiterplatte oder verwenden Sie einfach eine Sandwichplatine und eine Anschlussverkabelung.
- 2 Nr. Schritttreiber A4988
- 1 Nr. Arduino Nano
- 1 Nr. 16-polige IC-Schrittmotortreibersteuerung L293D
- M5-Gewindestangen
- 1 x 1 Zoll 20 x 20 mm Aluminium-Extrusionsstab
- Verschiedene Schrauben und Muttern sowie Muttern der Eichelkappe.
Ausrüstung benötigt :
- Bandschleifer
- Lötkit
- Schraubendrehersatz
- auch rotierend l
- 1/2 Zoll 1 Nr. 12 mm Spatenbohrer .
- Elektrische Drähte und Lötgeräte .
- Verschiedene Leiterplatten Kabelbuchsen und Stecker .
Mit all Ihrer Ausrüstung und anderen Komponenten in der Hand ist es jetzt an der Zeit, mit dem Build fortzufahren.
Das erste, was Sie tun müssen, ist, das Holzbrett so zu schneiden und zu formen, dass es die Basis der Maschine bildet. Der Hersteller gibt keine spezifischen Abmessungen an. Stellen Sie daher sicher, dass es mindestens groß genug ist, um alle Komponenten aufzunehmen.

Nach dem Zuschneiden die Kanten nach Bedarf mit Sandpapier oder einem auf einer Bank montierten Bandschleifer abschleifen und abrunden, falls vorhanden.
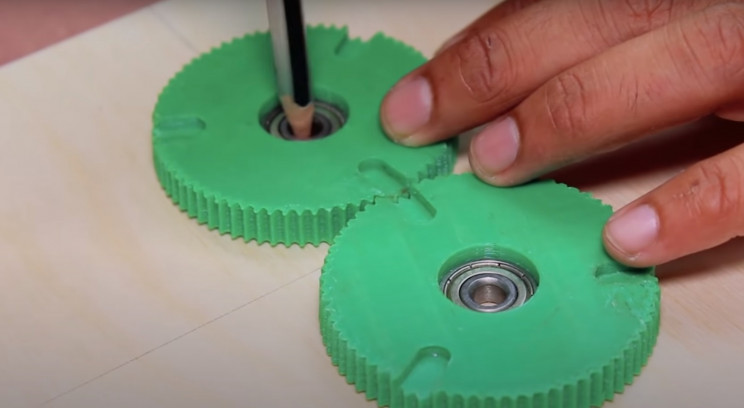
Als nächstes benötigen Sie einige 3D gedruckt Zahnräder und andere Teile zum Bewegen der Wollspulen, um den Faden zu flechten. Die Modelle für diese Teile finden Sie unter dieser Link .
Sie müssen drucken :
- Drei Hauptgänge.
- Ein Antriebsrad für einen der Schrittmotoren.
- Ein Achterteil.
- Zwei Tropfenstücke.
- Jeweils drei der beiden Hälften der Wollspulenträger ovale Teile.


Markieren Sie als Nächstes eine Halbierungslinie auf der Holzbasis und platzieren Sie die Zahnräder so, dass sie sich direkt in der Mitte der Platte treffen. Wenn Sie zufrieden sind, markieren Sie den Kontaktpunkt und auch die Position der Löcher der Kugellager.
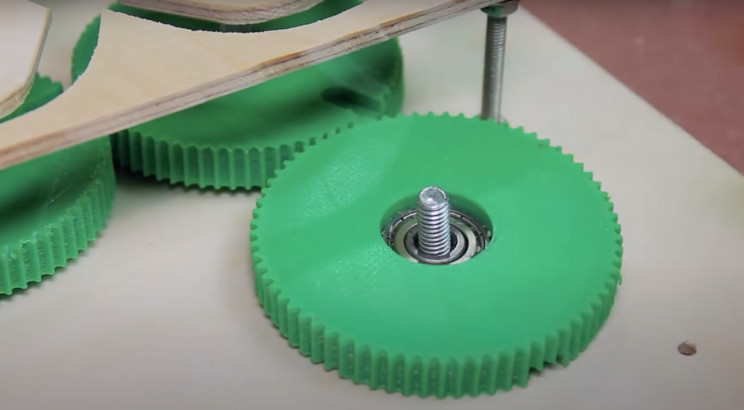
Bohren Sie nun zwei gleich große Löcher an den Positionen, die für die Mitte der Kugellager markiert sind. Senken Sie die Unterseite der Löcher mit a ab. 12 mm 5/8 Zoll Spatenbohrer zur Aufnahme des Kopfes einiger Gewindebolzen geeigneter Größe.
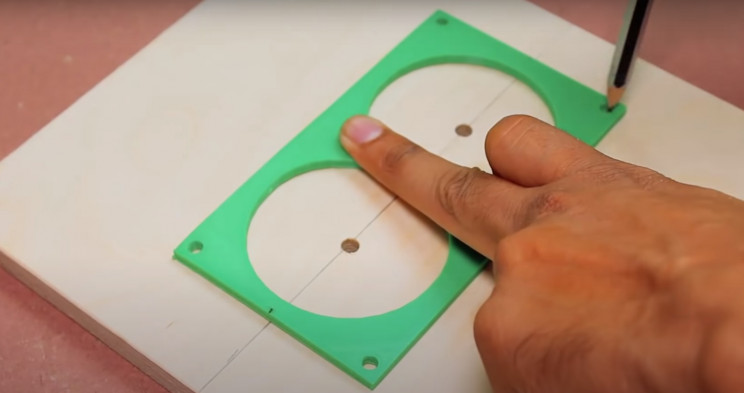
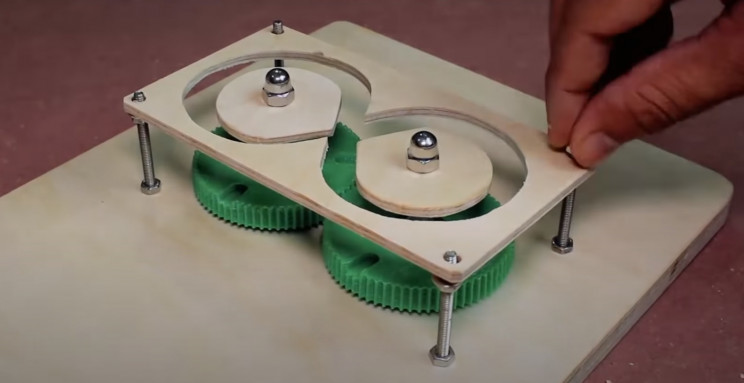
Nehmen Sie nun das 3D-gedruckte Achtstück und platzieren Sie es so über den Bohrlöchern, dass sich die Bohrlöcher im Epizentrum jedes Kreises befinden. Wenn Sie zufrieden sind, markieren Sie die Position der Bohrlöcher in jeder Ecke.
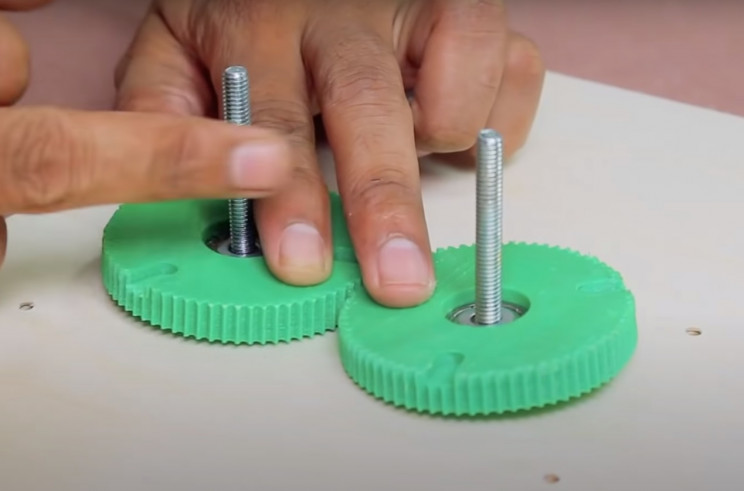
Bohren Sie die Löcher wie im Video gezeigt. Setzen Sie nun die Schrauben in die zentralen Löcher ein, fügen Sie jeweils eine große Unterlegscheibe hinzu und setzen Sie die 3D-gedruckten Zahnrad- und Kugellagerkomponenten auf die Schrauben.
Fügen Sie jeder Schraube eine zusätzliche Unterlegscheibe hinzu und befestigen Sie sie mit ausreichend großen Muttern.
Fügen Sie als Nächstes vier weitere Schrauben und Muttern zur Abbildung von acht Bohrlöchern hinzu, wie im Video gezeigt. Diese halten eine weitere achtteilige Holzfigur nächste Phase in einer Höhe über den Zahnrädern, ähnlich einer Tabelle.
Erstellen Sie als Nächstes Holzkopien der Träne und der acht 3D-gedruckten Teile. Verwenden Sie die gleichen Abmessungen wie bei den 3D-gedruckten Modellen, markieren Sie sie auf dem Sperrholz, schneiden Sie sie aus und schleifen Sie sie nach Bedarf ab.
Alternativ könnten Sie wahrscheinlich davonkommen, stattdessen nur die 3D-gedruckten Teile zu verwenden.
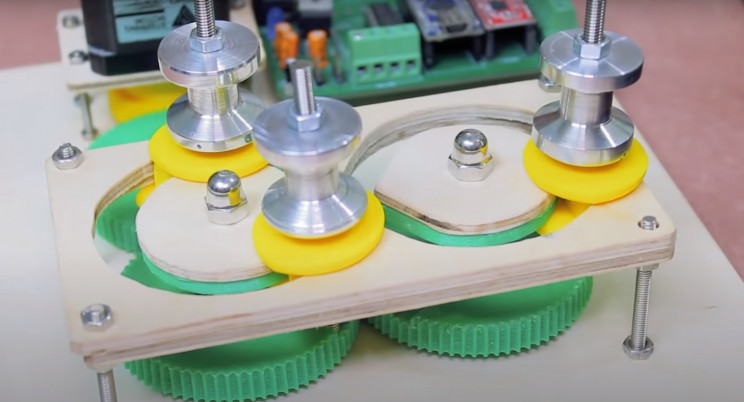
Befestigen Sie das tropfenförmige Holz- / Kunststoffteil oben auf jedem Zahnrad und halten Sie es mit einer Eichelkappenmutter fest. Machen Sie dasselbe auch für das achtköpfige Holz- oder Kunststoffteil.
Jetzt für dieses zusätzliche Zahnrad. Montieren Sie die beiden anderen mit einem Kugellager und markieren Sie ihre Position so, dass sie direkt neben einem der beiden anderen sitzt.
Die beiden anderen müssen gedreht werden, um sicherzustellen, dass die Position richtig ist, bevor Sie fertig sind. Wenn Sie zufrieden sind, markieren Sie die zentrale Position, bohren Sie ein Loch, versenken Sie es und befestigen Sie es wie die beiden anderen jedoch mit einer kürzeren Schraube.
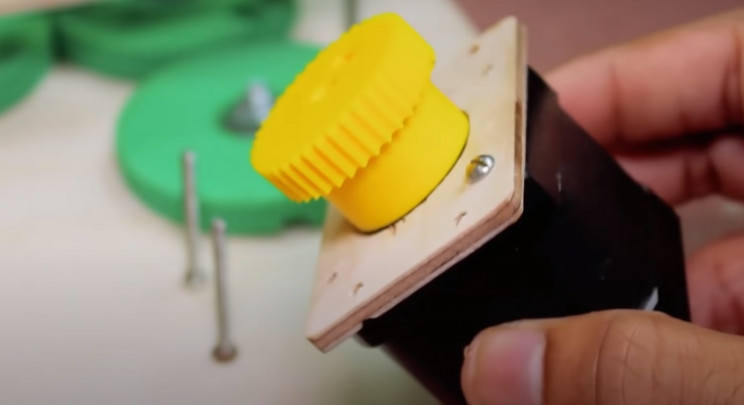
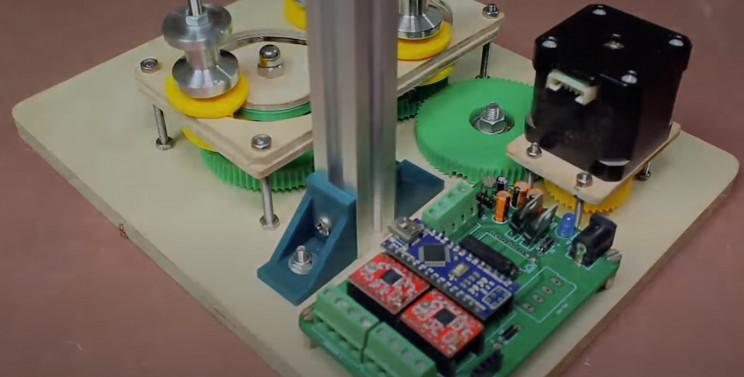
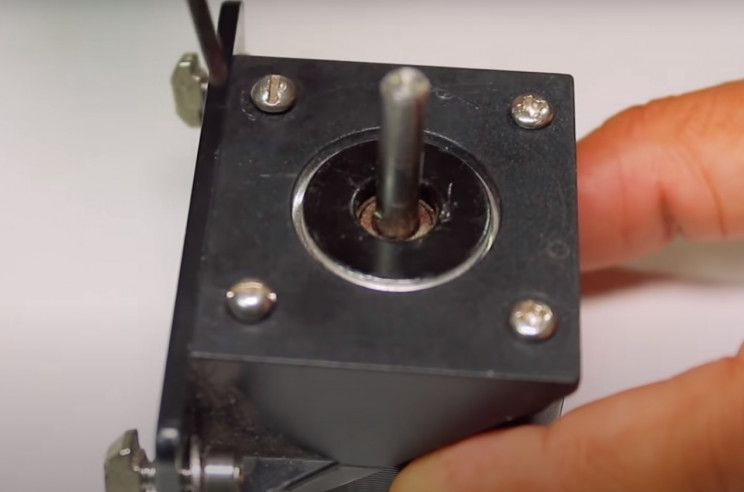
Erstellen Sie als Nächstes ein weiteres Holzstück oder einen 3D-Druck, das am Schrittmotor montiert werden soll. Es muss etwas größer als der Motor sein, um vier Schrauben an jeder Ecke aufzunehmen.
Es wird auch ein Loch in der Mitte benötigt, damit sich die Motorachse frei drehen kann. Wenn Sie mit dem Design zufrieden sind, kleben oder schrauben Sie es je nach Ihren Wünschen auf den Schrittmotor.
Sie benötigen außerdem ein weiteres 3D-Zahnrad, das so konstruiert sein muss, dass es auf die Achse passt und die anderen drei Gänge antreibt. Dies erfordert einige Versuche und Irrtümer.
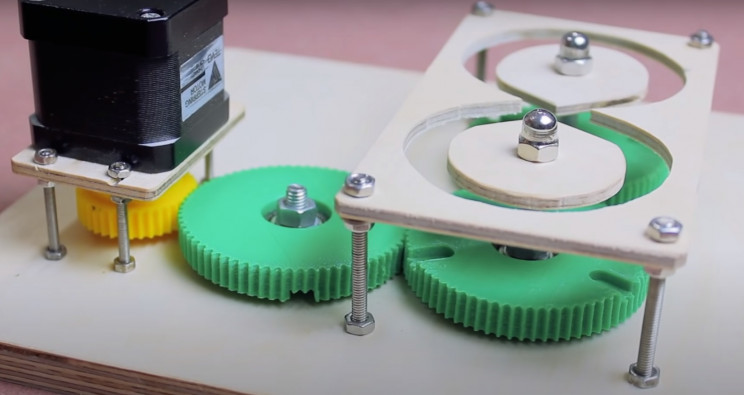
Markieren und bohren Sie nun vier weitere Bohrlöcher direkt unter dem dritten Gang. Diese halten die Schrittmotorbaugruppe an Ort und Stelle.
Stellen Sie sicher, dass sie mit der Position der Ecklöcher für die Schrittmotorhalterung übereinstimmen und dass das Zentralrad das dritte Rad sauber berührt.
Wenn die mechanischen Teile mehr oder weniger fertig sind, wenden wir uns den elektrischen Teilen zu. Für diesen Teil benötigen Sie a kundenspezifische Leiterplatte .
Für die Montage des Arduino Nano, des Motortreibers und anderer Komponenten sind Abschnitte erforderlich. Weitere Informationen hierzu finden Sie im Video.
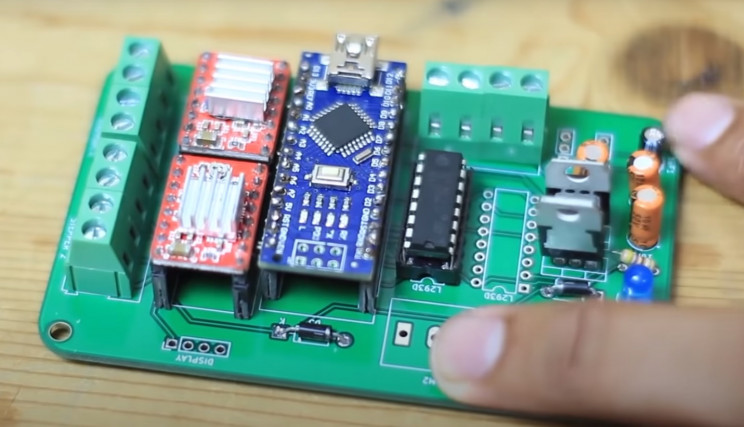
Montieren und löten Sie die verschiedenen Mikrokomponenten wie unten gezeigt.
Setzen Sie als nächstes den Arduino Nano sowie den ein. A4988 Motortreiber und Schrittmotor-Motorsteuerung, siehe unten.
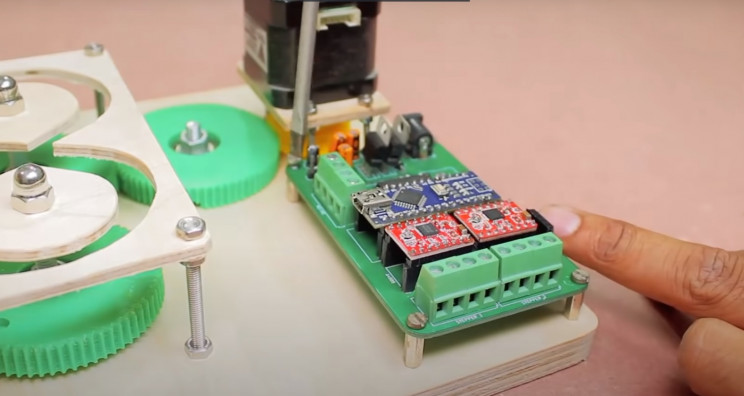
Jetzt auf die Fußleiste neben dem Schrittmotor legen. Markieren Sie die Befestigungslöcher, bohren Sie sie heraus und befestigen Sie die benutzerdefinierte Leiterplatte.
Als nächstes eine weitere wichtige Komponente - der Arduino-Code. Hier ist er in seiner ganzen Pracht :
#include
#include "BasicStepperDriver.h"
#include "MultiDriver.h"
#include "SyncDriver.h"
#define MOTOR_STEPS 200
#define MOTOR_X_RPM 30 // diesen Wert ändern, um die Drehzahl des Wickelmotors zu ändern
#define MOTOR_Y_RPM 90 // diesen Wert ändern o die untere Motordrehzahl ändern
#define DIR_X 8
#define STEP_X 9
#define DIR_Y 6
#define STEP_Y 7
#MICROSTEPS 32 definieren
BasicStepperDriver stepperX MOTOR_STEPS, DIR_X, STEP_X;
BasicStepperDriver stepperY MOTOR_STEPS, DIR_Y, STEP_Y;
MultiDriver-Controller stepperX, stepperY;
void setup {
stepperX.begin MOTOR_X_RPM, MICROSTEPS;
stepperY.begin MOTOR_Y_RPM, MICROSTEPS;
}
void loop {
controller.rotate 360, 360;
}
Und jetzt zurück zur Fertigstellung der mechanischen Teile der Maschine.
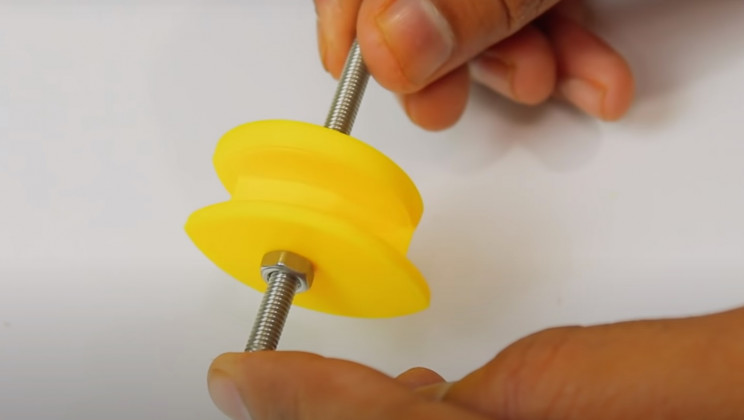
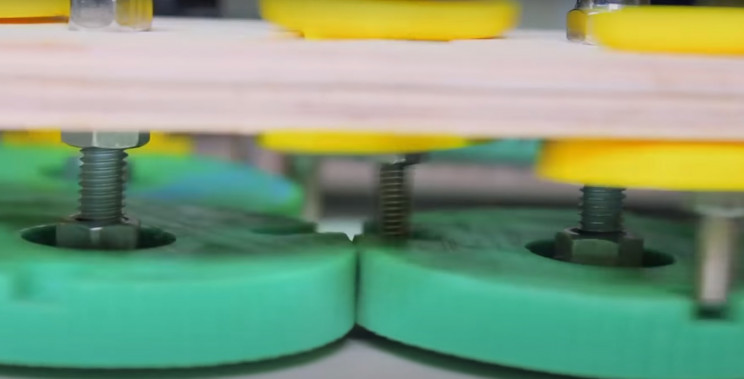
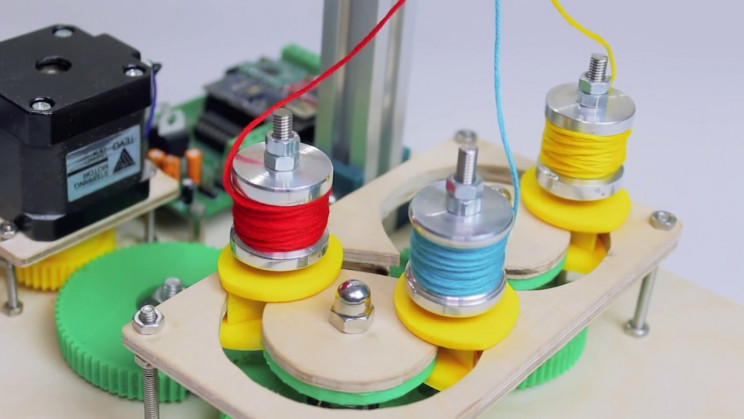
Schneiden Sie nun zwei gleich lange Abschnitte der 3M-Gewindestangen und eine etwas längere ab. Alle drei werden zur Montage der 3D-gedruckten Teile des Wollspulenträgers verwendet. Montieren Sie diese wie im Video und unten gezeigt.
Diese Teile werden verwendet, um die Wollspulen nach Fertigstellung um die Achterbahn zu führen. Sie sitzen in den U-förmigen Nuten in den Hauptzahnrädern und gehen zwischen diesen hindurch, sobald sie zusammengebaut sind.
Nun, um die eigentlichen Spulen herzustellen. Der Schöpfer in diesem Video bearbeitete drei davon aus einem Metallstab, aber Sie könnten wahrscheinlich auch Kunststoffalternativen entwerfen oder sogar kaufen.
Alternativ können Sie aus Holz oder einem anderen Material einen Satz schnitzen, wenn Sie der Aufgabe gewachsen sind. Denken Sie jedoch daran, dass diese Spulen ziemlich locker passen müssen, damit sie entfernt werden können.
Sie benötigen auch eine vierte, um das geflochtene Gewinde zu erhalten. Aus diesem Grund können Sie auch eine weitere Maschine maschinell oder in 3D drucken. Diese letzte Spule muss direkt an der anderen Schrittmotorachse montiert werdenkümmere dich um alles, wofür du dich entscheidest.
Um dieses Gerät originalgetreu neu zu erstellen, sehen Sie sich das Video an, um weitere Informationen zu erhalten.
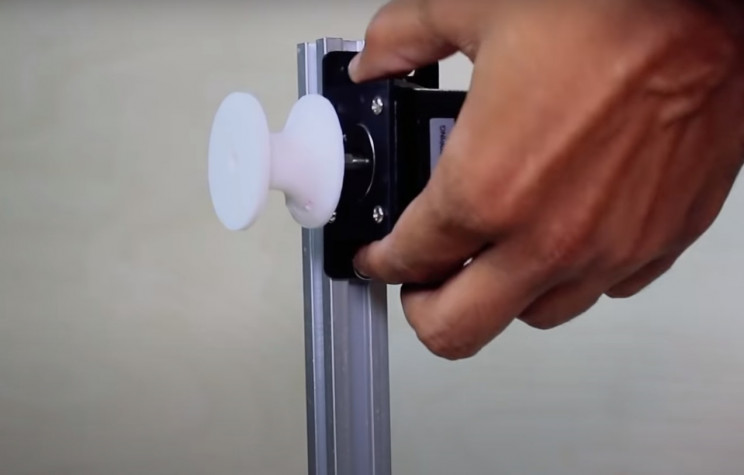
Schneiden Sie als Nächstes ein Stück der 20 x 20 Aluminiumstange ab. Befestigen Sie die Halterung mit gekauften oder 3D-gedruckten Halterungen zwischen der Flechtbaugruppe und der Leiterplatte.
Montieren Sie als Nächstes den zweiten NEMA-Schrittmotor in der Montagehalterung und befestigen Sie ihn oben auf der zentralen Aluminiumwelle. Die Halterung sollte mit allen erforderlichen Schrauben und Muttern geliefert werden.
Befestigen Sie als Nächstes Ihre vierte Spule an der Schrittmotorachse. Möglicherweise möchten Sie diesen Schritt ausführen, bevor Sie sie auch an der zentralen Aluminiumstange montieren.
Nun eine Art Fadenvorschubschleife, die die farbigen Fäden zusammenführt, damit sie zusammen geflochten werden können, bevor sie sich um die Aufnahmespule befinden. Sie müssen dies so gestalten, dass auch das andere Ende montiert werden kannauf der zentralen Aluminiumstange.


Verdrahten Sie nun die Motoren mit den entsprechenden Anschlüssen auf der benutzerdefinierten Leiterplatte, fügen Sie farbiges Garn zu den Spulen hinzu und befestigen Sie sie an den Trägern, binden Sie ihre Enden zusammen, führen Sie sie durch die Schlaufe und binden Sie sie an die Aufnahmespule.
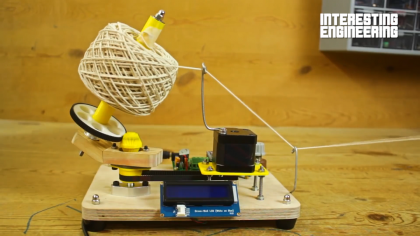
Wenn alles erledigt ist, schalten Sie einfach den Arduino ein und beobachten Sie, wie er in seiner ganzen Pracht weggeflechtet wird. Glückliches automatisiertes Geflecht!
Interessante Technik | wissenschaft-x.com ist Teilnehmer des Amazon Services LLC-Partnerprogramms und verschiedener anderer Partnerprogramme. Daher gibt es möglicherweise Partnerlinks zu den Produkten in diesem Artikel. Klicken Sie auf die Links und kaufen Sie auf Partnerseiten einSie erhalten nicht nur die Materialien, die Sie benötigen, sondern unterstützen auch unsere Website.