

Forscher haben eine neue Roboter-Fingerspitze entwickelt, mit der sich die Form in drei einzigartigen Konfigurationen ändern lässt. So kann ein breites Spektrum von Objekten mit ungeraden Formen erfasst und angehoben werden. Dies geht aus einer kürzlich in einem Artikel über a vorgedruckte Website und auf der IEEE International Conference on Automation Science 2020 vorgestellt.
VERBINDUNG: DIESE ORIGAMI-INSPIRIERTEN MIKROBOTER KÖNNEN KOMPLIZIERTE AUFGABEN AUSFÜHREN
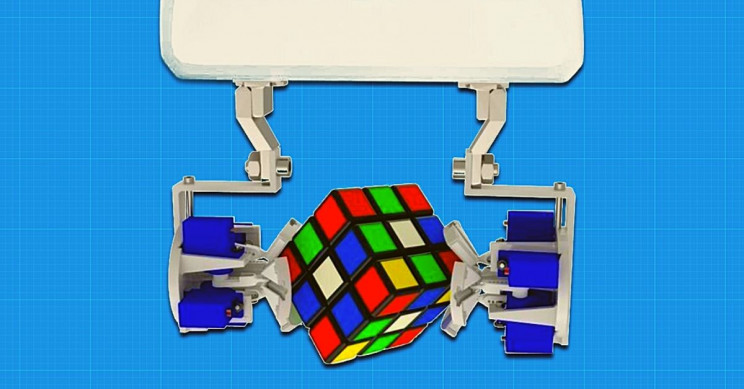
Origami-inspirierte Roboter-Fingerspitze verwandelt sich, um seltsam geformte Objekte zu greifen und anzuheben
Um Objekte zu handhaben und zu bewegen, müssen Roboter ihren Griff anpassen, um Manipulationsstrategien unter Verwendung der Eigenschaften der Objekte und der Umgebung, TechXplore, zu erreichen. Berichte .
Die Strukturen der meisten Roboterhände beschränken ihre Fähigkeit, sich an verschiedene Objekte anzupassen, was die Anzahl der Bewegungen einschränkt, die sie ausführen können, und lässt nur wenige einfache Objekte in Reichweite. Aus diesem Grund haben die Forscher der Hong Kong University of Science and Technology geschaffendie Fingerspitze des Roboters - zum Lösen mehrerer Objekte mithilfe eines Designs, das sich an der bekannten japanischen Kunst des Papierfaltens orientiert.
Fingerspitzen müssen für verschiedene Objekte mehrere Posen einnehmen
"Unsere Studie wurde von zwei gemeinsamen Beobachtungen in aktuellen Forschungs- und Industrieanwendungen inspiriert", sagten Yazhan Zhang und Zicheng Kan, zwei der an der Studie beteiligten Forscher, per E-Mail zu TechXplore. "Die erste bezieht sich auf in der Vergangenheit entwickelte ParallelgreiferForschungsstudien, die zur industriellen Automatisierung beitragen könnten. Diese Greifer erfordern gut ausgewählte Greifpunkte, da sonst möglicherweise kein statisches Gleichgewicht erreicht wird. "
Dies geschieht nach jahrzehntelanger Forschung in der Entwicklung von Techniken zur Steuerung der Posen, die Robotergreifer erreichen müssen, um verschiedene Objekte zu erfassen. Bis vor kurzem stießen die meisten vorhandenen Designs auf schwerwiegende Einschränkungen, die sie daran hinderten, effektiv über verschiedene Objekte und Formen hinweg zu verallgemeinern.
Das erste Ziel der Studie war die Entwicklung einer einfach zu steuernden Roboter-Fingerspitze, die in der Lage ist, viele Posen zu spielen und ohne größere Probleme zu arbeiten.
Origami-basierte Roboter-Fingerspitze besteht aus zwei Hauptkomponenten
"Die andere Beobachtung in der Vergangenheit, die unsere Studie inspiriert hat, ist, dass Ingenieure für einen stabilen Griff einen speziellen Clamper entwerfen müssen, der für Manipulationen, z. B. Pick and Place usw., am parallelen Greifer befestigt ist", berichten Zhang und Kan, TechXplore. "Es ist mühsam, wenn ein Element am Fließband mit einer anderen Form geändert wird, was zu einem ineffizienten manuellen Austausch der Klemmen führt. Die von uns erstellte Morphing-Fingerspitze könnte dazu beitragen, dieses Problem zu mindern oder zu überwinden. "
Das Roboter-Fingerspitzendesign wurde von Zhang, Kan und ihren Kollegen entwickelt und lässt sich auch von Strukturen inspirieren, die in früheren Studien vorgestellt wurden. In 2019 Die Forscher bauten einen von Origami inspirierten monolithischen weichen Greifer mit einer flachen Fingerspitze.
Während sich der Greifer verformen und seine Form ändern kann, blieben Nutzlast und Geschicklichkeitsleistung hinter den Erwartungen zurück, hauptsächlich aufgrund der Weichheit und Ebenheit der Fingerspitzen.
"Ein Doktorand in unserer Gruppe, Herr Song Haoran, hat zuvor auch einen Artikel über das Clustering von Kontaktoberflächen veröffentlicht, der drei typische Kontaktprimitive für die Darstellung wichtiger lokaler Geometrien zeigt", so Zhang und Kan.
"Diese auf parallelen Greifern montierten Fingerspitzen wurden an verschiedenen Objekten getestet, um die Machbarkeit und Stabilität der Griffe anzuzeigen. Dieses Papier hat uns dazu inspiriert, eine verwandelnde Fingerspitze mit ihren Morphologiekonfigurationen innerhalb der drei Kontaktprimitive zu entwerfen", fügten Kan und Zhang hinzu.
Die neuartige Origami-basierte formverändernde Fingerspitze besteht aus zwei Hauptkomponenten: einem weichen Origami-Skelett, das wie die Morphing-Oberfläche der Fingerspitze funktioniert, und motorgetriebenen Viergelenkverbindungen, die als Übertragungs- und Betätigungsmechanismen fungieren.
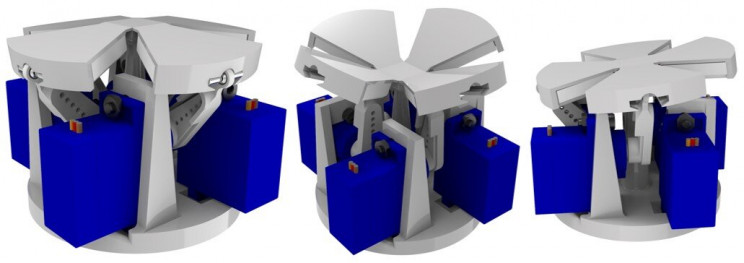
Roboterfinger enthält Servomotoren für unterschiedliche Greifmodi
Die Forscher installierten eine Kugel in der Mitte der Fingerspitze, um eine freie Drehung in drei Dimensionen zu ermöglichen und zusätzlich die Oberseite zu stützen. Außerdem installierten sie auch Servomotoren eine Klasse von Drehantrieben zur unabhängigen Steuerung von vier Blattfacetten auf dem weichen Origami-Skelett.
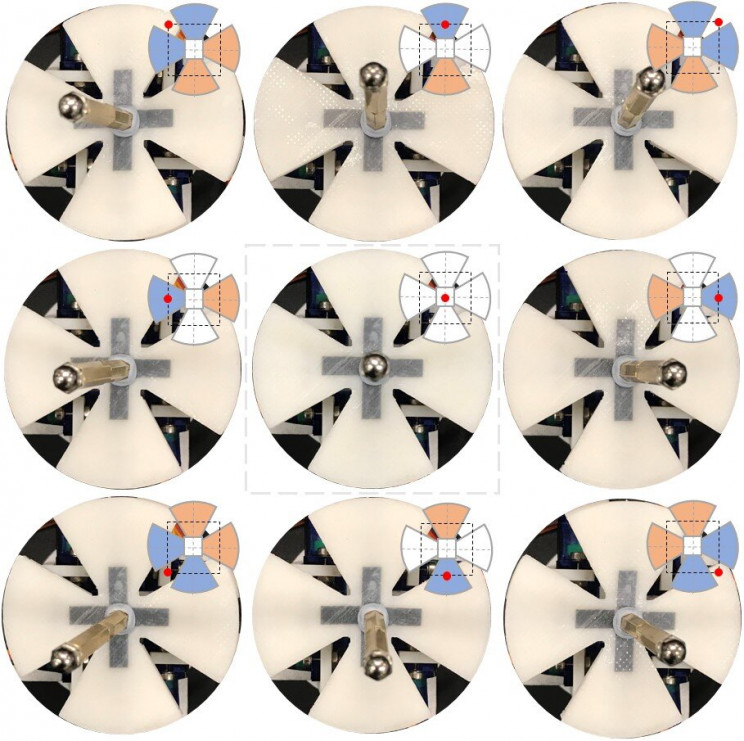
"Mit den Kombinationen verschiedener Posen auf jeder Blattfacette können viele Konfigurationen für unterschiedliche Greifmodi erzielt werden, z. B. konvexer Modus, konkaver Modus und gekippter planarer Modus", erklärten Zhang und Kan, TechXplore. Berichte .
Die Fingerspitze eines Roboters muss vor der Integration des Roboters genauer untersucht werden.
Die Fingerspitze des Roboters der Forscher könnte entscheidend sein Bewegungen für effektives Greifen nach drei Auswertungen des Morphing-Modus. Ein Modus umfasste den konvexen Modus für das sogenannte Schwenken und Quetschen, ein zweiter den konkaven Modus für die Durchführung eines Kraftgriffs - und ein dritter war ein gekippter planarer Modus, der für in entwickelt wurde-hand Neuorientierung und Manipulation von Objekten.
Im Allgemeinen entdeckte das Forscherteam, dass die Fingerspitze mehrere vorteilhafte Eigenschaften besitzt - einschließlich der Fähigkeit, Modi schnell zwischen verschiedenen verwandelnden "Grundelementen" und Greifmodi zu wechseln, einschließlich geschickter und stabiler Greifmodi, die für unterschiedliche Aufgaben kuratiert wurden.
Weitere Forschung ist erforderlich, um das Design der Roboterfingerspitzen zu miniaturisieren und zu optimieren, bevor die Forscher es für den praktischen Einsatz in integrieren können. reale Szenarien . Der Umfang der Technik, der für eine Fingerspitze eines Roboters erforderlich ist, zeigt jedoch nur, wie viel wir für unsere biologischen Kollegen für selbstverständlich halten.