

Humanoide Roboterbewegung Yang et al./University of Edinburgh
Roboter sind ein wichtiger Teil unserer Zukunft, und Forscher auf der ganzen Welt haben hart daran gearbeitet, reibungslose Fortbewegungsstile zu ermöglichen. humanoide Roboter und Roboter mit Beinen gleich
Jetzt ein Forscherteam aus der Universität von Edinburgh in Schottland wurde ein Rahmen für die Ausbildung humanoider Roboter zusammengestellt, um mithilfe menschlicher Demonstrationen genau wie wir Menschen zu gehen.
Ihre Studie wurde am vorveröffentlicht arXiv und kombiniert Nachahmungslernen und tiefgreifende Verstärkungstechniken. Ihre Ergebnisse wurden auch in veröffentlicht. IEEE Xplore .
SIEHE AUCH: IRANS AM MEISTEN ERWEITERTE MENSCHLICHE ROBOTERFLÜSSE HONDAS ASIMO
Nützliches menschliches Wissen in Robotersystemen
"Die Schlüsselfrage, die wir untersuchen wollten, war, wie 1 nützliches menschliches Wissen in Roboter Fortbewegungs- und 2 Daten zur Erfassung menschlicher Bewegungen zur Nachahmung in ein tiefgreifendes Lernparadigma, um die autonomen Fähigkeiten von Robotern mit Beinen effizienter zu verbessern ", sagte Chuanyu Yang, einer der Forscher der Studie TechXplore .
"Wir haben zwei Methoden vorgeschlagen, um menschliches Vorwissen in ein DRL-Framework einzuführen."
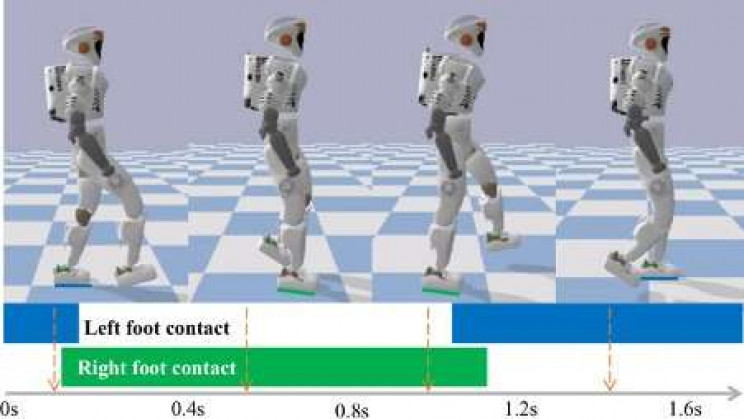
Das Framework des Teams basiert auf einem einzigartigen Belohnungsdesign, das Bewegungsbeschriftungsdaten von Menschen verwendet, die im Rahmen des Trainingsprozesses gehen. Anschließend wird dies mit zwei speziellen hierarchischen neuronalen Architekturen kombiniert: a Phased-Function-Neuronales Netzwerk PFNN und a Modus adaptives neuronales Netzwerk MANN.
"Der Schlüssel zur Replikation menschenähnlicher Fortbewegungsstile besteht darin, menschliche Gehdaten als Expertendemonstration für den Lernagenten einzuführen", erklärte Yang. "Belohnungsdesign ist ein wichtiger Aspekt des verstärkenden Lernens, da es das Verhalten von regeltDer Agent."
Sie müssen an die Ähnlichkeiten denken, wenn Sie einen Hund trainieren, um Tricks auszuführen, und ihn anschließend mit einem Knochen belohnen ...
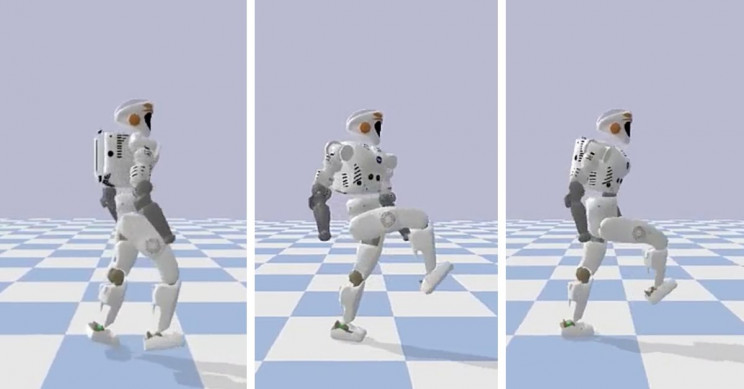
Die wunderbare Nachricht über das Rahmenwerk des Teams war, dass es den humanoiden Robotern sogar ermöglichte, auf unebenem Boden oder bei externen Stößen zu arbeiten.
Das Team Befunde schlagen vor, dass Expertendemonstrationen, wie z. B. das Gehen von Menschen, die Lerntechniken zur Tiefenverstärkung für das Training von Robotern in einer Reihe verschiedener Fortbewegungsstile erheblich verbessern können. Letztendlich könnten sich diese Roboter genauso schnell und einfach bewegen wie Menschen, auch wenn sie natürlicher und natürlicher sind menschenähnliches Verhalten .
Im Moment wurde die gesamte Forschung durch eine Simulation durchgeführt. Die nächsten Schritte umfassen das Ausprobieren des Frameworks im wirklichen Leben.
"In unserer zukünftigen Arbeit planen wir auch, den Lernrahmen zu erweitern, um eine vielfältigere und komplexere Reihe menschlicher Bewegungen nachzuahmen, wie z. B. allgemeine motorische Fähigkeiten quer Fortbewegung , Manipulation und Greifen, " Yang sagte .