

enorm Fischschwärme gehören zu den umwerfendsten Sehenswürdigkeiten der Natur. Tausende winziger Fische synchronisieren ihr Verhalten und ihre Bewegung, um Nahrung zu finden, zu wandern und Raubtieren zu entkommen.
Ein Forscherteam der Harvard University hat dieses Verhaltensmuster mit einem Roboterschwarm namens Blueswarm nachgeahmt, der seine Bewegung ohne externe Kontrolle synchronisiert. Ihre Forschungsergebnisse wurden in veröffentlicht. Wissenschaftsrobotik .
VERBINDUNG: ENGINEERS BAUEN DEN ERSTEN ROBOTERFISCH, UM MIT EINER TUNA Schritt zu halten
Blueswarms fischartige Roboterkoordination
Fischschwärme synchronisieren ihr Verhalten ohne Anführer: Jeder einzelne Fisch trifft Entscheidungen auf der Grundlage dessen, was seine Nachbarn tun, durch einen natürlichen Prozess, der als implizite Koordination bezeichnet wird.
Fasziniert von dieser Art der dezentralen Selbstorganisation machte sich das Team aus Harvard daran, eine Schule fischähnlicher Roboter zu entwickeln, die sich ähnlich wie Fische in der Natur synchronisieren lassen.
Durch ihre Bemühungen entwickelten sie die erste Unterwasserroboter ausstellen komplexes kollektives 3D-Verhalten mit impliziter Koordination.
"Roboter werden häufig in Bereichen eingesetzt, die für Menschen unzugänglich oder gefährlich sind, in denen ein Eingreifen des Menschen möglicherweise nicht möglich ist", erklärte Florian Berlinger, Doktorand bei SEAS und Wyss und Erstautor des Papiers inein Pressemitteilung .
"In diesen Situationen ist es sehr vorteilhaft, einen hochautonomen Roboterschwarm zu haben, der autark ist. Durch implizite Regeln und visuelle 3D-Wahrnehmung konnten wir ein System schaffen, das unter Wasser ein hohes Maß an Autonomie und Flexibilität aufweistwo Dinge wie GPS und WiFi nicht zugänglich sind. "
Komplexes synchronisiertes Verhalten
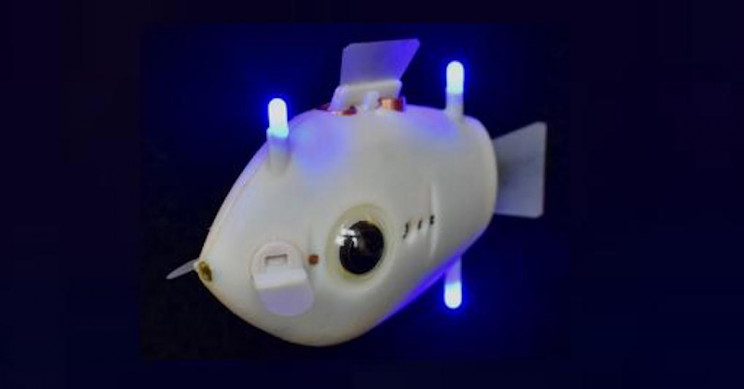
Um ihre Roboter zu entwickeln, haben die Forscher ein visionsbasiertes Koordinationssystem auf Blau-Basis entwickelt. LED leuchtet . Jeder einzelne Fischroboter, Bluebot genannt, ist mit zwei Kameras und drei LED-Lichtern ausgestattet.
Eine integrierte Fischobjektivkamera, die bemerkenswert wie ein echtes Fischauge aussieht, erkennt die LEDs benachbarter Bluebots und verwendet einen benutzerdefinierten Algorithmus, um deren Position und Bewegung zu bestimmen.
Die Forscher zeigten, dass Blueswarm in der Lage ist, komplexes synchronisiertes Verhalten wie Aggregation, Dispersion und Kreisbildung zu demonstrieren.
Die Forscher sagen, dass die Erkenntnisse aus diesem Projekt ihnen hoffentlich helfen, Miniatur-Unterwasserschwärme zu entwickeln, die leistungsfähig sind. Umweltüberwachung und sogar Suchmissionen in fragilen Umgebungen wie Korallenriffen, um die Umwelt zu schützen.