

A neu MIT Mit dem System können Roboterentwickler verschiedene Roboterformen simulieren, um zu bestimmen, welche für das gewünschte Ergebnis am besten geeignet ist.
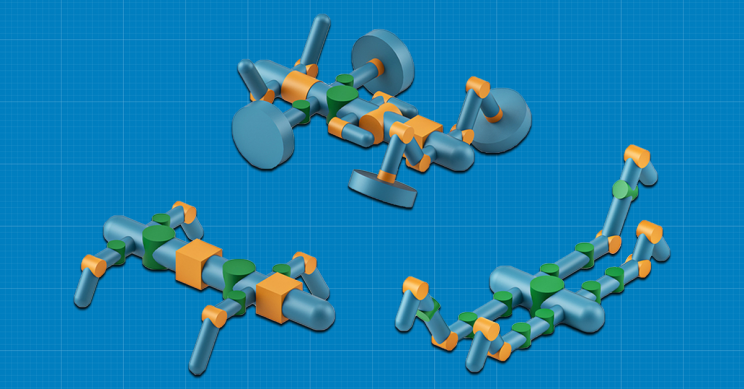
Das System mit dem Namen RoboGrammar simuliert verschiedene Roboterformen, nachdem Entwickler die Teile eingegeben haben, die sie für ihren Roboter verwenden möchten, sowie die Art des Geländes, in dem ihr Roboter navigieren muss.
VERBINDUNG: NEUE ROBOTER BIETEN COVID-SAFE-LÖSUNGEN FÜR LIVE-EREIGNISSE
Automatisierung des Roboterdesigns
"Roboterdesign ist immer noch ein sehr manueller Prozess", erklärt Allan Zhao, Hauptautor des Papiers und Doktorand am MIT-Labor für Informatik und künstliche Intelligenz CSAIL, in a Pressemitteilung .
Zhao beschreibt RoboGrammar als "eine Möglichkeit, neue, erfinderischere Roboterdesigns zu entwickeln, die möglicherweise effektiver sein könnten."
Das Team am MIT sagt, dass die Hauptinspiration für RoboGrammar eher aus dem Tierreich als aus anderen Ländern stammt. Roboterdesigns - insbesondere Arthropoden wie Spinnen und Hummer.

RoboGrammar arbeitet in drei aufeinander folgenden Schritten: Definieren des Problems, Erstellen möglicher Roboterlösungen und Auswählen der optimalen Modelle.
Mit diesen Schritten verwendet RoboGrammar die Regeln der vom MIT-Team festgelegten Graphgrammatik, um Hunderttausende potenzieller Roboterstrukturen zu entwerfen.
"Es war ziemlich inspirierend für uns, die Vielfalt der Designs zu sehen", sagt Zhao. "Es zeigt definitiv die Ausdruckskraft der Grammatik."
Entwerfen des optimalen Roboters
Um dann zu bewerten, welches der Designs am besten funktioniert, hat das Team für jedes einen Controller entwickelt. Roboter mit einem Algorithmus namens Model Predictive Control, der eine schnelle Vorwärtsbewegung priorisiert.
"Die Form und die Steuerung des Roboters sind eng miteinander verbunden", sagt Zhao. "Deshalb müssen wir eine Steuerung für jeden Roboter einzeln optimieren."
Sobald sich jeder simulierte Roboter bewegen kann, suchen die Forscher die leistungsstarken Roboter mithilfe einer "graphheuristischen Suche". Dieser neuronale Netzwerkalgorithmus tastet Robotersätze iterativ ab und bewertet sie, sagen die Forscher. Letztendlich ermöglicht er das RoboGrammarProgramm zur Auswahl des optimalen Roboterdesigns für ein bestimmtes Szenario.
All dies geschieht, bevor der menschliche Designer ein einzelnes Werkzeug aufgenommen oder einen einzelnen Prototyp gebaut hat.
Ein Programm, das im Wesentlichen künstliche Intelligenz zum Entwerfen von Robotern verwendet, zieht unvermeidliche Skynet-Vergleiche, könnte aber auch Robotikern helfen, die bestmöglichen Modelle für Roboter zu bauen. Katastrophenhilfe und andere ähnliche Funktionen.