


Der von Tintenfischen inspirierte Roboter neben einem echten Tintenfisch. Universität von Southampton , Brian Sevald
Wissenschaftler der University of Southampton und der University of Edinburgh entwickelten einen flexiblen Unterwasserroboter, der effizient und nachahmend durch das Wasser gleitet. Tintenfisch und Quallen.
In ihren Studie , veröffentlicht in Wissenschaftsrobotik, Die Herausgeber behaupten, dass ihr Roboter genauso effizient schwimmt wie die Meerestiere, die ihr Design inspiriert haben.
VERBINDUNG: EIN TEAM ERSTELLTE ORIGAMI-INSPIRIERTE WEICHE ROBOTER
Von Tintenfischen und Quallen inspirierter weicher Roboter
Die Forscher sagen, dass ihr weicher Roboter aufgrund der Flexibilität seines Körpers und seiner Beweglichkeit im Wasser zur Durchführung einer Reihe von Unterwassermissionszielen verwendet werden könnte.
"Die Faszination für Organismen wie Tintenfische, Quallen und Tintenfische hat enorm zugenommen, da sie insofern einzigartig sind, als ihr Mangel an unterstützender Skelettstruktur sie nicht an herausragenden Leistungen beim Schwimmen hindert", so Co-Autor Dr. Francesco Giorgio-Serchi von der School of Engineering an der Universität von Edinburgh, erklärt in a Pressemitteilung .
Die Qualle ist das effizienteste Tier in der Natur, wenn ihre Fortbewegungsmittel im Zusammenhang mit den "Transportkosten" berechnet werden.
Resonanz für Unterwasserantrieb
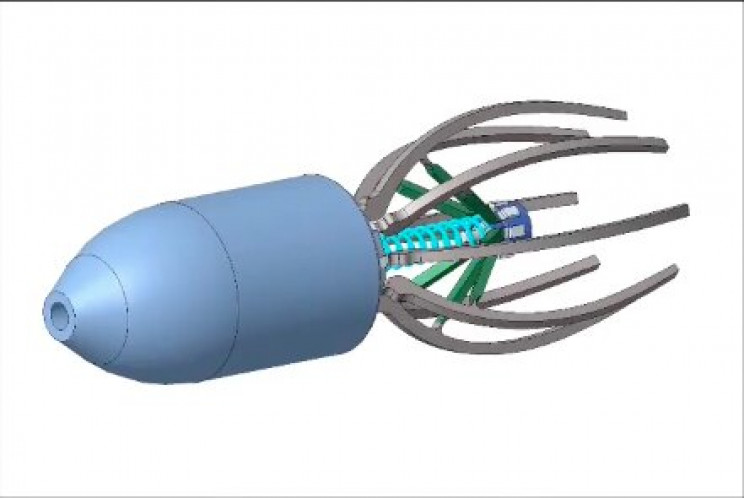
Der neue Roboter, der an der Universität von Southampton entwickelt wurde, ist das erste Tauchboot, das Resonanz für Unterwasserantriebe verwendet. Dadurch kann der Roboter nur sehr wenig Strom verbrauchen und gleichzeitig große Wasserstrahlen für Antriebe erzeugen.
Der Mechanismus besteht aus acht 3D-gedruckt flexible Rippen, die von einer Gummimembran umschlossen sind, um eine "Antriebsglocke" zu bilden. Die Glocke dehnt sich aus und springt dann mit Hilfe eines kleinen Kolbens zurück, um die Bewegungen einer Qualle nachzuahmen. Mit dieser Technik kann sich der Roboter an einem Körper bewegenLänge pro Sekunde und entsprechen der Effizienz der Aurella aurita Quallen, sagen die Forscher.
Vielversprechende Zukunft für weiche Robotik
"Es gibt immer noch viele Herausforderungen und aufregende Möglichkeiten, die mit weichen Unterwasserrobotertechnologien erforscht werden können." Dr. Gabriel Weymouth, außerordentlicher Professor an der School of Engineering der Universität, der das Projekt betreute, erklärte.
"Wir versuchen nun, das Konzept dahinter zu erweitern Roboter zu einem vollständig wendigen und autonomen Unterwasserfahrzeug, das in der Lage ist, seine Umgebung zu erfassen und zu navigieren ", fuhr er fort.
Der neue von Quallen und Tintenfischen inspirierte Roboter wird in eine wachsende Liste weicher Robotik aufgenommen. Innovationen die das Potenzial haben, unsere Fähigkeit zur Unterwasserüberwachung und -erkundung zu verändern.