

Quelle : Google Brain Study / arXiv
A neue Studie von Forschern bei Google hat ernsthafte Fortschritte gemacht in Richtung Roboter die lernen, ohne menschliche Hilfe durch die Welt zu navigieren Berichte Technologieüberprüfung.
VERBINDUNG: IRANS AM MEISTEN ERWEITERTE ROBOTERFLÜSSE HONDA'S ASIMO
Ein selbstlernender Roboter aus virtuellen Umgebungen
Diese neue Studie baut auf Forschungen auf, die ein Jahr zuvor durchgeführt wurden, als die Forschergruppe zum ersten Mal lernte, wie man a Roboter Lernen in der realen Welt. Die Fähigkeit, erlerntes Verhalten zu verstärken, ist eine gängige Praxis in der Simulation - a virtuell Klon des Roboters wirbelt hilflos um eine virtuelle Kopie seiner Umgebung herum, bis AI Der Algorithmus hat sich ausreichend angepasst, um in der realen Welt gut zu funktionieren. Dann wird das Programm in den Roboter importiert und eingeschaltet.
Offensichtlich hilft diese Methode dem Roboter zu vermeiden Schaden weil in der realen Welt, in der die Folgen für einen Ausfall für das Risiko zu hoch sind, keine Trial-and-Error-Läufe mehr erforderlich sind. Der Roboter benötigt jedoch ein Modell, das einfach zu simulieren ist - verstreuten Kies oder Federn einer MatratzeEs dauert so lange, um die Metallbasis eines Roboters zu erweichen. Die Simulation ist die Mühe nicht wert.
Aus diesem Grund versuchten die Forscher, die Probleme der Modellierung zu vermeiden, indem sie den Roboter in der reale Welt zu Beginn. Zu diesem Zweck haben sie einen effizienteren Algorithmus entwickelt, der mit weniger Versuchen und weniger Fehlern lernen kann und den Roboter innerhalb von zwei Stunden laufen lässt. Da sich die physische Umgebung natürlich ändert, kann sich der Roboter auch relativ schnell an andere anpassenähnliche Umgebungen wie Stufen, leichte Steigungen und flache Bereiche mit Hindernissen.
Das Realitätsprinzip als Algorithmus
Der Roboter brauchte jedoch noch einen Menschen Babysitter um hunderte Male einzuspringen, sagte Jie Tan, Mitautor der Zeitung und Leiter des Robotik-Fortbewegungsteams bei Google Brain, zu Technology Review. "Anfangs habe ich nicht darüber nachgedacht", sagte er.
Das wurde ein neues Problem. Der erste Schritt, um es anzugehen, bestand darin, das Erkundbare zu binden. Gelände steht dem Roboter zur Verfügung und lässt ihn mehrere Manöver gleichzeitig trainieren. Als der Roboter beim Erlernen des Vorwärtslaufens den Rand eines begrenzten Bereichs erreichte, kehrte er einfach die Richtung um und lernte das Rückwärtslaufen.
Als nächstes beschränkten die Forscher die Bewegungen, die dem Roboter während seines Versuchs zur Verfügung standen, um Schäden durch Vorsicht zu minimieren und Stürze zu vermeiden. Natürlich fiel der Roboter trotzdem, also fügten sie einen weiteren Algorithmus hinzu, damit er aufstehen konnte.
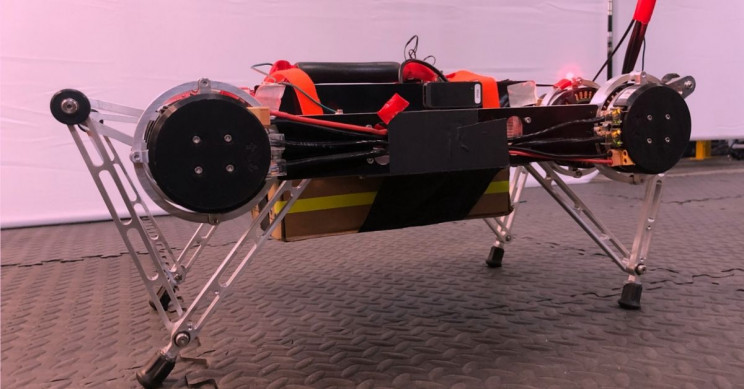
Mit zunehmenden Änderungen und Anpassungen konnte der Roboter selbstständig über unterschiedliche Oberflächen laufen, darunter ebenen Boden, eine Fußmatte mit Spalten und a Memory Foam Matratze. Diese Arbeit bietet Potenzial für zukünftige Anwendungen, bei denen sich Roboter durch unwegsames, unversöhnliches Gelände bewegen müssen, ohne dass Menschen helfen können.
"Ich finde diese Arbeit ziemlich aufregend", sagte Chelsea Finn, Assistenzprofessorin bei Stanford Google aber nicht Teil der Forschung, zu Technology Review. "Es ist sehr schwierig, die Person aus dem Prozess zu entfernen. Indem Roboter autonomer lernen können, sind Roboter eher in der Lage, in der realen Welt, in der wir leben, zu lernenals in einem Labor. "
Aber sie warnt, es gibt einen Haken: Das vorliegende Setup verwendet ein Bewegungserfassungssystem, das den Roboter von oben nach oben scannt. Spur seine Position. Dies ist in realen Szenarien nicht der Fall.
In Zukunft planen die Forscher, ihren neuen Algorithmus an verschiedene Roboter anzupassen oder sogar an mehrere Roboter, die gleichzeitig in derselben Umgebung lernen. Tan glaubt, dass der Trick zum Freischalten nützlicherer Roboter darin besteht, die Fortbewegung zu knacken.
"Viele Orte sind für Menschen gebaut, und wir haben alle Beine", sagte er zu Technology Review. "Wenn ein Roboter keine Beine benutzen kann, kann er nicht durch die menschliche Welt navigieren."
Von militärische Anwendungen um Menschen wie a zu helfen Begleithund macht die Zukunft der Roboter Robotik eine der verlockendsten Ingenieurkarrieren auf absehbare Zeit.