

Wenn es um Robotik geht, haben wir alles gesehen, besonders wenn es ums Springen geht.
Wir waren eingeweiht Salto das kann präzise springen wie ein Turner. Wir haben Boston Dynamic's gesehen Atlas Robotersprung und Backflip. Wir sind sogar darauf gestoßen winzige Mikrobots die in Ihrem Dickdarm herumspringen, um Medikamente abzugeben.
VERBINDUNG : DIESER ROBOTER KANN LAUFEN, SPRINGEN UND FLIEGEN, ABER WICHTIGSTES FÄLLT NIEMALS AB
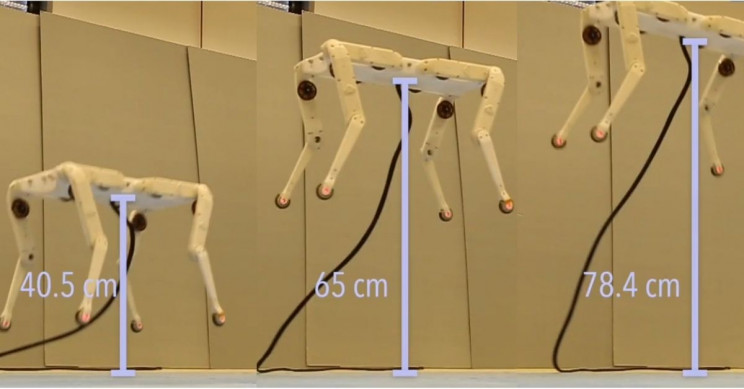
Alle diese Bots hatten jedoch eines gemeinsam: Sie landen nicht immer auf ihren Füßen. Jetzt ist ein neues Video aufgetaucht, in dem Wissenschaftler Robotern beibringen, so hoch wie möglich zu springen und fest auf ihren Füßen zu landen.
Sie erreichen diese edle Aufgabe mit Bayes'sche Optimierung mit unbekannten Einschränkungen. Diese spezifische sequentielle Entwurfsstrategie zur globalen Optimierung von Black-Box-Funktionen nimmt keine funktionalen Formen an und wird am häufigsten zur Optimierung teuer zu bewertender Funktionen verwendet.
In den Wissenschaftlern Vordruck Die Experten erklären, wie in den letzten zehn Jahren gezeigt wurde, dass zahlreiche Algorithmen für maschinelles Lernen optimale Richtlinien erlernen. Fehlerszenarien waren jedoch eine häufige Gefahr. In Roboteranwendungen haben viele Algorithmen Schwierigkeiten, Daten aus Fehlern zu nutzen, und dies auchDas Team hat zu diesem Thema etwas zu bieten.
Die Forscher bezeichneten fehlerhafte Verhaltensweisen als alle "diejenigen, die eine Einschränkung verletzen und sich mit dem Problem des" Lernens mit Absturzbeschränkungen "befassen, bei dem bei einer Verletzung der Einschränkung keine Daten erhalten werden." Anschließend behandelten sie die Fälle ohne Daten über ein GP-Modell GPCR für die Einschränkung, die diskrete Ereignisse Misserfolg / Erfolg mit kontinuierlichen Beobachtungen kombiniert. Dies ermöglichte es ihnen, die Wirksamkeit ihres Frameworks an simulierten Benchmarks und an echten springenden Vierbeinern zu demonstrieren.
Die Wissenschaftler berichteten dann über ein positives Ergebnis, das sowohl die manuelle Abstimmung als auch die GPCR übertraf. Das Video dieser Ergebnisse unten enthalten macht Spaß, wenn die Roboter wackeln, aber schließlich auf ihren kleinen Füßen landen.