


In a Papier kürzlich in der Zeitschrift veröffentlicht Wissenschaftsrobotik Forscher der Universität Tokio stellten ihre neuen vor "Biohybrid" -Roboter. Der Roboter ist eine Kreuzung zwischen lebendem Gewebe und Robotik und integriert die Biohybrid-Robotik in lebendes Muskelgewebe, das aus den Zellen einer Ratte gewachsen ist.
Der Biohybridroboter könnte möglicherweise verwendet werden, um fehlende Anhänge am Menschen zu ersetzen - sollte die Technologie wiederholt und mit menschlichem Gewebe repliziert werden. Die Universität Tokio schlägt jedoch vor, dass ihre Forschung den Grundstein für den Bau weitaus fortschrittlicherer und lebensechterer Roboter legt.
Japanische Ingenieure integrieren lebende Muskeln in Roboter.
- China Xinhua News @XHNews 30. Mai 2018
Die Roboter können Aktionen des menschlichen Fingers nachahmen. https://t.co/r5CeluR0Ss
Video mit freundlicher Genehmigung von 2018 Shoji Takeuchi, Institut für Industriewissenschaften, Universität Tokio pic.twitter.com/gmCizoYwFh
Bau eines Biohybrid-Roboters, der lebendes Gewebe verwendet
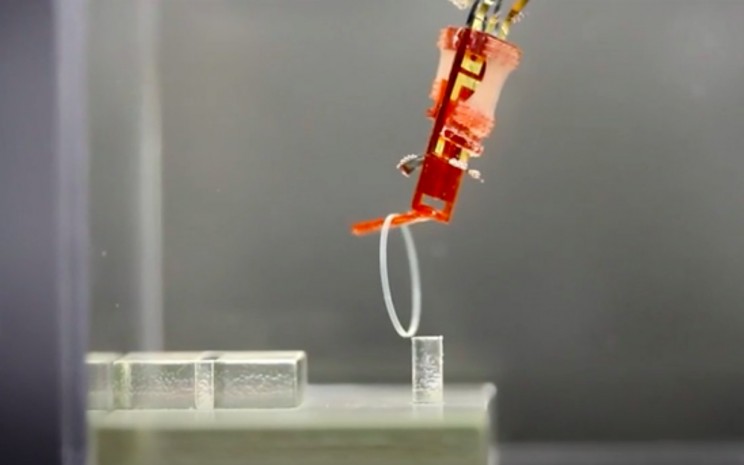
Glücklicherweise umfasste die Forschung nicht den direkten Schaden eines Nagetiers. Der Muskel wurde stattdessen aus Myoblasten - Muskelzellen von Ratten - gezüchtet. Die Zellen wurden auf der Oberfläche eines Hydrogels gezüchtet, das dann an eine Roboter-Skelettstruktur gebunden wurdeMit der Zeit wuchsen die Zellen zwischen zwei Ankerpunkten auf der Skelettstruktur und bildeten ein funktionelles Gelenk. Bei Stimulation mit elektrischem Strom können sich beide Seiten der Hybridmuskeln zusammenziehen oder ausdehnen, wodurch sich die Finger des Roboters am Gelenk beugen müssen - ähnlich wie bei diesemeines Menschen.
„Wenn wir mehr dieser Muskeln in einem einzigen Gerät kombinieren können, sollten wir in der Lage sein, das komplexe Muskelspiel zu reproduzieren, das die Funktion von Händen, Armen und anderen Körperteilen ermöglicht.“ sagte Shoji Takeuchi Hauptautoren der Studie und Maschinenbauingenieur an der Universität Tokio. „Obwohl dies nur ein vorläufiges Ergebnis ist, könnte unser Ansatz ein großer Schritt zum Aufbau eines komplexeren Biohybrid-Systems sein.“

Da der Roboter lebendes Gewebe verwendet, muss er natürlich ständig in Wasser getaucht werden, um am Leben zu bleiben - eine der Hauptbeschränkungen des Projekts. Es ist jedoch nicht das einzige Problem, das im Laufe seiner Entwicklung aufgetreten ist.
Takeuchi hat bereits zuvor semi-funktionelle Biohybrid-Gliedmaßen entwickelt, aber seine früheren Arbeiten hatten Mühe, die Länge der Muskeln aufrechtzuerhalten. Frühere Techniken umfassten das Aufwachsen einer Kultur von Muskelgewebe auf einer flexiblen Schicht und die Kontrolle mit einem Strom, der durch die Fasern geleitet wirdDie Muskeln ziehen sich zusammen und beugen das Gelenk erfolgreich, aber sie würden auch schnell über den Punkt der Nützlichkeit hinaus schrumpfen.
Das Problem ergibt sich aus einem inhärenten Merkmal des Skelettmuskels - wenn sie verwendet werden, wachsen sie. Das Wachsen einer einzelnen Muskelschicht auf einer Seite des Substrats kann vorübergehend verwendet werden, bis der Muskel zu stark wird, als dass das Substrat das Gelenk reißen könntezurück in ihre neutrale Position. Die Substratschicht biegt sich schnell bis zu dem Punkt, an dem sie nicht mehr nützlich ist.
Mit Biorobotik das Leben imitieren
Es ist ziemlich offensichtlich, dass das Leben nicht unter dieser Einschränkung leidet. Die meisten Wirbeltierarten - solche mit einer Wirbelsäule oder Wirbelsäule - umgehen das Problem, indem sie Muskeln einsetzen. antagonistische Paare .
Antagonistische Paare wie Bizeps und Trizeps wirken zusammen, um eine Bewegung des Arms zu verursachen oder zu hemmen. Wenn sich eines zusammenzieht, dehnt sich das andere aus und ermöglicht oder hemmt die Bewegung des Arms - es bildet sich ein antagonistisches Paar.

Laut Takeuchi verhindert eine antagonistische Paarung den Verschleiß und verlängert die Nutzungsdauer des Muskelgewebes erheblich. Mit dieser Technik konnte er die Lebensdauer des Muskelgewebes auf etwas mehr als eine Woche verlängern - deutlich länger als in früheren Studien.
In seiner neuen Forschung nutzte Takeuchi die antagonistische Paarungsstrategie seiner neuen Biohybridroboter.
Anstatt eine einzelne Muskelschicht auf einem Substrat aufzubauen, nahm Takeuchi zwei separate Muskelschichten und installierte sie auf gegenüberliegenden Seiten eines Gelenks. Die Muskeln wurden parallel ausgekleidet, um eine realistischere Muskelpaarung zu simulieren. Jede Seite wurde dann angestoßenGoldelektroden, die, wenn sie durch elektrischen Strom induziert werden, dazu führen würden, dass sich beide Seiten ausdehnen oder zusammenziehen.
Die Muskeln spannen sich immer noch an, tun dies jedoch auf beiden Seiten gleichermaßen, wodurch verhindert wird, dass sich das Gelenk wie bisher fehlgeschlagen über den Gebrauch hinaus faltet. Die neue Technik verbesserte die Geschicklichkeit der Roboterfingerbewegung erheblich.

In der obigen Tabelle ist die Art und Weise, wie jeder Muskel stimuliert wurde, um eine gleichmäßige Gelenkrotation zu erzeugen, während der gesamten Bewegung und Platzierung des Rings angegeben.
Die Probleme mit Biohybridrobotern
Die Forscher haben jedoch noch viele Probleme vor sich. In der derzeitigen Konfiguration erzeugt das Induzieren eines elektrischen Stroms durch den Muskel Blasen im umgebenden Wasser, was einen wesentlichen Beitrag zum Abbau des Gewebes leistet.
Derzeit untersuchen Forscher andere Methoden, um die Bewegung der Muskeln ohne Elektrizität zu stimulieren. Diese Methoden können die Verwendung eines Motoneurons zur Steuerung der Stimulation beider Muskeln umfassen - eine Methode, die sich bereits als erfolgreich erwiesen hat. Ein Motoneuronist eine Zelle, die die Muskelbewegung direkt steuern kann.
Zurück Forschung hat bereits bewiesen Es ist möglich, ein kleines neuronales Gerät zu züchten, das Muskeln fernsteuern kann. Netzwerke können aus Motoneuronzellen gezüchtet werden und werden von gesteuert Stimulation der Neuronen mit Lasern .
Ein Motoneuronennetzwerk könnte hypothetisch zur Kontrolle ausgebaut werden Takeuchis Biohybrid-Roboterfinger. Das Gerät würde durch einen Laser künstlich stimuliert, wodurch die Aktivität im neuronalen Netzwerk induziert und die Muskeln gezwungen würden, entsprechend zu reagieren.
Unabhängig von den möglichen Auswirkungen würde ein solches Gerät die Kontrolle von lebendem Gewebe verbessern und es Wissenschaftlern ermöglichen, Bewegungen von Biohybridrobotern genauer und naturgetreuer als je zuvor durchzuführen, indem lebendes Gewebe an Robotern verwendet wird.
Via : Wissenschaftsrobotik