


Chris Young Formveränderndes flüssiges Metall könnte die Robotik revolutionierenDanielle De La Bastide
vor 2 Monaten
Formveränderndes flüssiges Metall könnte die Robotik revolutionierenDanielle De La Bastide Von
frei zugängliches Archiv arXiv .Der Digger Finger von MIT wurde entwickelt, um die Form von Objekten zu erkennen, die in körnigem Material wie Sand und Kieselsteinen vergraben sind. Um dies zu tun, mussten sie eine Roboterhand mit schlanken Fingern entwickeln, die vibrieren konnten, um kompakte Sandkörner zu entfernen.
"Der
Die Idee ist, einen Finger zu machen, der einen guten Tastsinn hat und zwischen den verschiedenen Dingen unterscheiden kann, die er fühlt", Studienautor Edward Adelsonerklärt in einer Pressemitteilung. "Das wäre hilfreich, wenn Sie zum Beispiel vergrabene Bomben finden und deaktivieren möchten." Aufbauend auf der früheren Arbeit des MIT über künstliche Berührung
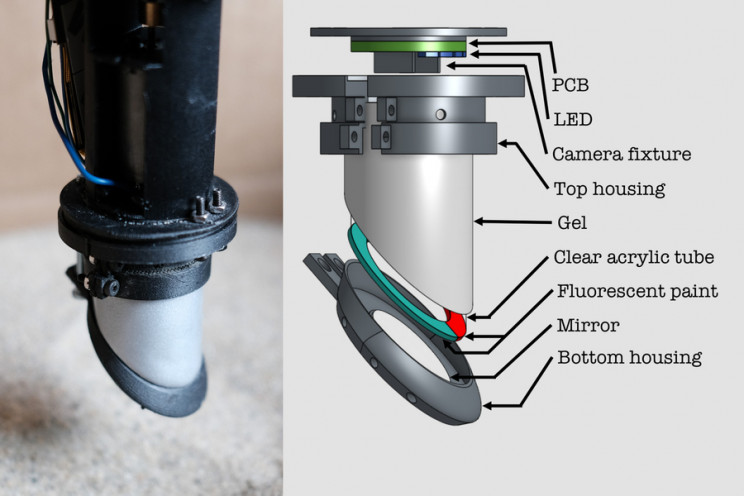
Technologie namens GelSight, das unglaublich detaillierte 3D-Karten von Objekten mit künstlicher Berührung liefert.GelSight
besteht aus einem klaren Gel, das mit einer reflektierenden Membran bedeckt ist, und einer Reihe von LED-Leuchten. Die Lichtstrahlen der LEDs verzerren sich, wenn sich das Gel bei Kontakt mit Objekten verformt. Das verzerrte Licht wird wiederum von a analysiertAlgorithmus für maschinelles Lernen, der die 3D-Form des Objekts erkennt, das diese Verformung verursacht.Ein Diagramm der Teile des Digger Fingers neben einer Nahaufnahme des Roboters. Quelle: MIT
Das Team hinter dem Digger Finger glaubt, dass seine neue Entwicklung für eine genauere Messung des Untergrunds verwendet werden könnte.
Verbesserung der Bereiche Robotik und künstliche BerührungDie Digger Finger-Technologie gesellt sich zu einer ganzen Reihe neuer Roboterhand-Innovationen, die in den letzten Jahren vorgestellt wurden.
2019 entwickelten Forscher des Wyss Institute for Biologically Inspired Engineering in Harvard und des Baruch College in CUNY einen weichen Robotergreifer kann eine Qualle halten
, das zu 95 Prozent aus Wasser besteht, ohne die Kreatur zu beschädigen.Ähnlich präsentierte OpenAI eine geschickte menschenähnliche Roboterhand im Jahr 2019 mit der Fähigkeit, einen Zauberwürfel mithilfe von Reinforcement Learning zu lösen. WerbungMit Digger Finger des MIT stellt sich das Team vor, dass Roboterhände schließlich so geschickt werden wie ihr menschliches Äquivalent und heikle Aufgaben übernehmen, die derzeit nur Menschen vorbehalten sind, die sich auf ein Gebiet spezialisiert haben, wie beispielsweise ein Chirurg.
Die Forscher gaben an, dass der Digger Finger in naher Zukunft verwendet werden könnte, um an gefährlichen Orten nach vergrabenen Bomben oder Kabeln zu suchen.
Letztendlich werden die neuesten Arbeiten des MIT-Teams dazu beitragen, die Technologie der künstlichen Berührung zu verbessern, und das Team wird die Fähigkeit der Roboterhand weiterentwickeln, sich genau auf bestimmte Objekte zu konzentrieren und unnötige Geräusche aus dem Untergrund zu unterdrücken.
Werbung
Folgen Sie uns auf
Formveränderndes flüssiges Metall könnte die Robotik revolutionierenDanielle De La Bastide