
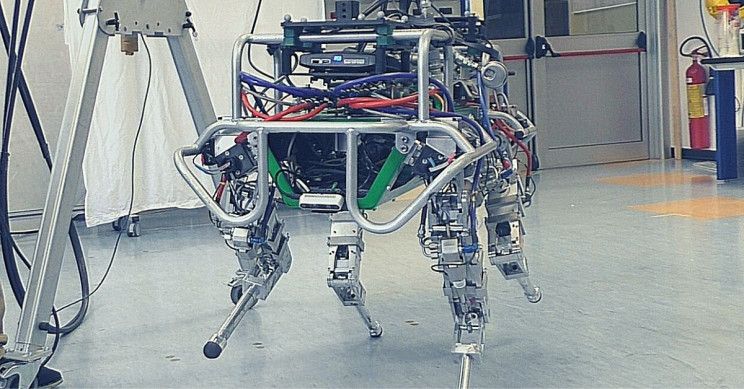

Ein Team von Ingenieuren hat einen vierbeinigen Roboter namens HyQ entwickelt, der laut Ninja auf zwei Beinen über schmale Brücken "läuft". ein Video Freitag auf YouTube veröffentlicht.
VERBINDUNG: DIESER FANTASTISCHE ROBOTER MIT VIER BEINEN MACHT BACKFLIPS AM MIT
Ninja Walk des vierbeinigen Roboters mit nur zwei Beinen
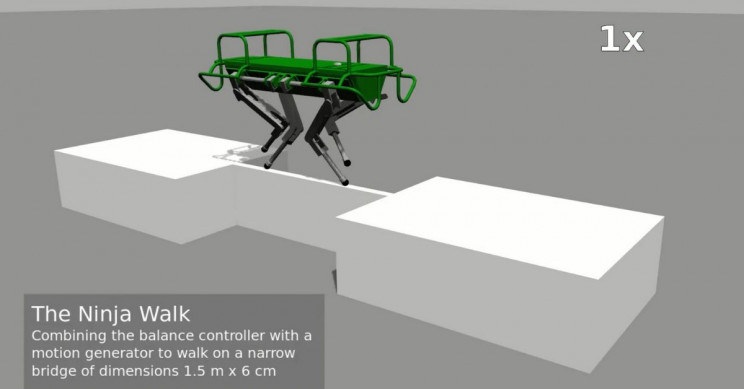
Mit einem Gewicht von 90 Kilogramm kann sich dieser "Ninja" -Roboter auf einer Stützleine ausbalancieren und sich von kleinen Ausrutschern und Erschütterungen erholen. Mit einem Balance-Controller passt sich der Roboter an Änderungen der Körperhaltung an, einschließlich unterschiedlicher Höhen, die über erreicht werdenAnpassen des Winkels der Beingelenke.
Um über schmale 6-Zentimeter-Brücken mit einer Länge von bis zu 1,5 Metern zu laufen, führt der Roboter einen "Ninja" -Schritt durch - mit einem Bewegungsgenerator geht er mit fantastischer Präzision über die schmale Linie.
Neue Balance-Steuerung vermittelt Roboter-Ninja-Fähigkeiten
Das Herzstück dieser futuristischen Leistung ist ein neuer Balance-Controller, für den Roboter mit Beinen . Es werden Punktfüße verwendet, die - da kleinere Fußflächen mehr Gleichgewicht erfordern, um ohne Sturz zu gehen - nicht nur die Roboter selbst, sondern auch die Ingenieure, die sich in einer eingeschränkten Umgebung mit Mathematik, Metall,und Silizium.
"Wir stellen einen Balance-Controller vor, der das Potenzial hat, für Vierbeiner ein Line-Walking zu erreichen. Unsere ersten Experimente zeigen, dass der 90-kg-Roboter HyQ auf zwei Füßen balanciert und sich von externen Stößen erholt sowie einige Änderungen der Haltung erreicht werden, ohne zu verlierenGleichgewicht ", sagte ein Teamvertreter von Istituto Italiano Di Tecnologia. ein Bericht aus dem Tagebuch IEEE-Spektrum .
Wir haben gesehen, wie Roboter wie Actionhelden auf Hindernissen Treppen steigen, Mikro-Influencer auf Rikschas ziehen und sogar Roboter Backflips ausführen, aber das sprichwörtliche Drahtseil wie ein Ninja zu laufen, ist ein Muss für Roboter-Enthusiasten. Man fragt sich, was drin istspeichern für die Zukunft von Roboterbewegung .