








ESA schreibt Robotikgeschichte mit vom Weltraum aus gesteuertem Gesteinsprobengreifer
Ein Astronaut konnte einen Rock-Sampling-Rover von der Internationalen Raumstation aus steuern.
Die ESA schrieb Robotikgeschichte, als die Agentur einen erdgebundenen Rover von der Internationalen Raumstation aus kontrollierte. Die Agentur übernahm einen Greifer, der die Geschicklichkeit einer menschlichen Hand besaß, und nahm damit Gesteinsproben aus einer Umgebung aufMondbedingungen simulieren.
Als Analog-1-Testprojekt bezeichnet, wurde die Aufgabe vom ESA-Astronauten Luca Parmitano ausgeführt. Ziel war es zu bewerten, ob diese Technologie eine hochpräzise Robotersteuerung unter schwerelosen Bedingungen ermöglichen kann.
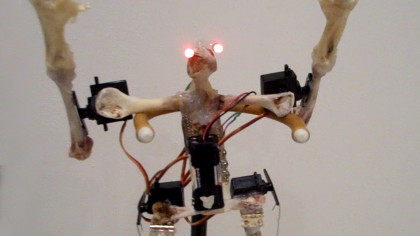
„Stellen Sie sich den Roboter als Lucas Avatar auf der Erde vor, der ihm sowohl Sicht als auch Berührung bietet“ sagte ESA-Ingenieur Kjetil Wormnes leitet die Analog-1-Testkampagne. „Sie war mit zwei Kameras ausgestattet - eine in der Handfläche, die andere in einem wendigen Arm -, damit Luca und die entfernt gelegenen Wissenschaftler die Umgebung beobachten könnenund mach eine Nahaufnahme auf den Felsen. ”
Das Projekt war ein Erfolg, da der von Luca kontrollierte Rover seine Probenahmekampagne termingerecht abschloss. Dazu musste der Rover drei Probenahmestellen durchlaufen, während Luca Beiträge von geologischen Experten des European Astronaut Center EAC in erhieltDeutschland.
„Wir haben durch unser Pangaea-Programm von Lucas früherem Training profitiert und Astronauten praktische Erfahrungen in der Geologie vermittelt“, fügte Jessica Grenouilleau, Projektleiterin von Meteron bei der ESA Exploration Systems Group, hinzu. ”