


Biomimetik ist definiert als die Nachahmung der Modelle, Systeme und Elemente der Natur zur Lösung menschlicher Probleme, die als komplex angesehen werden.
Zum Beispiel inspirierten die winzigen Haken an Bohrerfrüchten bereits 1941 das Klettband. Heutzutage schreitet die Technologie jedoch weiter voran, und das Gebiet der Robotik zielt darauf ab, die Wunder der Natur in ihren Betrieb umzusetzen.
Forscher an der BioRobotics Institute der Sant'Anna School of Advanced Studies In Pisa, Italien, wurde ein weicher Roboter entwickelt, der auf der Anatomie und Körperlichkeit eines Tintenfischs basiert. Kraken sind aufgrund ihrer einzigartigen Kopffüßerhaut aufgrund ihrer einzigartigen Kopffüßerhaut besonders faszinierend, da sie sich blitzschnell tarnen könnenkann ihnen erlauben, sich in fast überall hinein zu quetschen.
Cecilia Laschi, die führende Wissenschaftlerin des Teams, das diesen Octo-Bot entwickelt hat, beschrieb ihre Gründe für die Wahl des achtbeinigen Meerestiers als ihre Roboterinspiration.
„Ich habe mich aus zwei Gründen für den Bau von Robotern entschieden, die die Form des Oktopus nachahmen. Erstens, weil sie gut geeignet sind, die vielen Vorteile zu demonstrieren, die sich ergeben, wenn eine Maschine nach Bedarf gebogen und gequetscht werden kann. Außerdem ist dies eine hervorragende TechnikHerausforderung: Ein Oktopus mit acht wackeligen Armen, die angesichts komplexer hydrodynamischer Kräfte zusammenarbeiten müssen, ist sehr schwer zu entwerfen und zu kontrollieren “, schreibt sie in einem Artikel aus dem Jahr 2016 in. IEEE-Spektrum.

Das ultimative Ziel von Laschis Octo-Bot-Forschung und -Entwicklung war es, ein „grundlegendes Umdenken von Robotertheorien und -techniken“ zu fördern. Die Verwendung eines Tieres wie eines Oktopus hilft dabei, Strategien für einen Roboter zu entwickeln, der seine Gliedmaßen in mehrere Richtungen kräuseln und erstellen kannMaterialien, die in Aktuatoren verwendet werden können, die sich biegen und dehnen.
Ein Kopffüßer-Roboter könnte über Fabriken und Industrien hinaus nützlich sein, in denen sich wiederholende Aufgaben erforderlich sind. Er eignet sich wahrscheinlich besser für Landschaftsveränderungen wie den unerforschten Meeresboden oder das fremde Terrain des Mars. Ein Roboter, der sich an jede Umgebung anpassen kann, ohne zu werdenstecken und dienen sogar als autonome chirurgische Werkzeuge für das Innere unseres Körpers.
Wie haben sie das gemacht?
Sie begannen mit der Untersuchung der Arme des Oktopus und seiner muskulären Hydrostatstruktur, „die es ermöglicht, dass das Gesamtvolumen des Arms konstant bleibt, während sich einzelne Muskeln zusammenziehen und ihre Form ändern.“ Sie arbeiteten auch eng mit Meeresbiologen zusammen, um Daten wie den Arm zu sammelnMessungen zur Erstellung genauer Computermodelle, die das Gesamtdesign steuern würden.
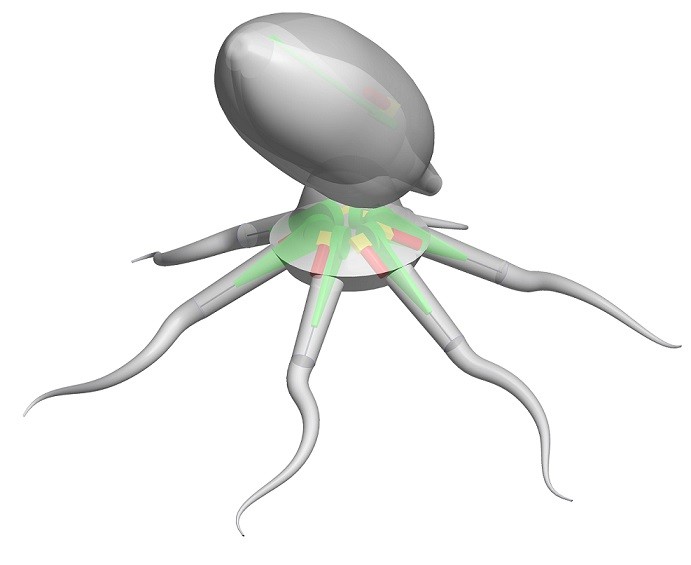
Schließlich experimentierten sie mit weichen Aktuatoren, um die Muskeln des Tieres nachzuahmen. Sie schufen Muskeln mit SMAs oder Formgedächtnislegierungen, die sich beim Erhitzen zu einer vordefinierten Form verformen, an die sie sich „erinnern“.
„Wir haben SMA-Drähte zu Federn geformt und elektrischen Strom durch sie geleitet, um sie zu erwärmen, wodurch die Federn so zusammengedrückt wurden, dass sie Muskelkontraktionen imitieren“, schreibt Laschi.
Durch Senden einer Spannung durch verschiedene Federsätze konnten sie einen Unterwasserarm an mehreren Stellen biegen und sogar Objekte erfassen, ähnlich wie bei einem Tintenfisch.
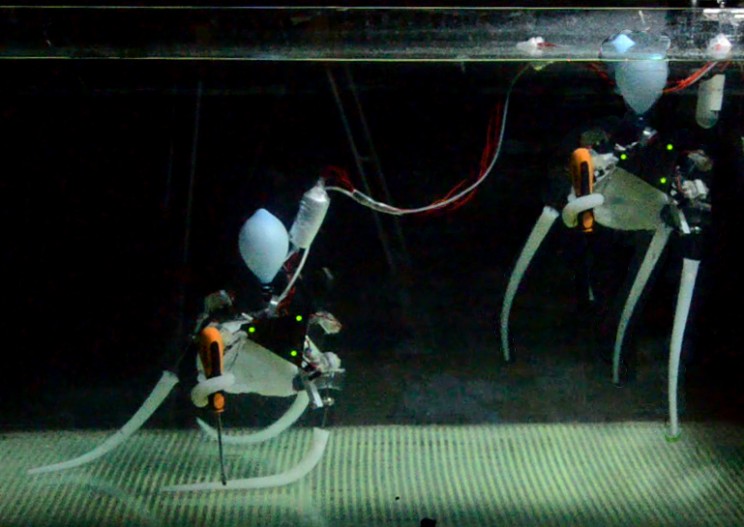
Um es zum Schwimmen zu bringen, wandten sie sich erneut dem Computer zu, um den Mantel oder den Kopf eines Oktopus des Oktobots zu entwerfen, der Wasser sammelt und sich zusammenzieht, um es auszuwerfen und einen Strahlantrieb zu erzeugen.
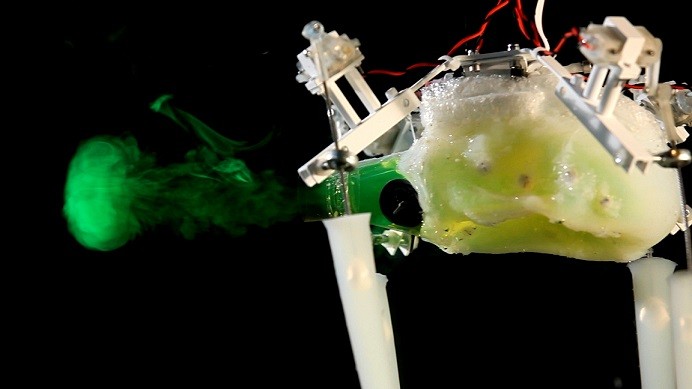
Unter Verwendung eines evolutionären Algorithmus fand das Team die optimale Kombination aus Silikonmantel, die „mit nur einem kleinen Motor und ein paar einfachen Kabeln den Octo-Bot-Strahl durch das Wasser schicken würde.“
Nachdem dieser PoseiDrone-Prototyp im Mittelmeer geworfen wurde, konnte er sich erfolgreich gegen die Unvorhersehbarkeit des Ozeans behaupten und die gesamte Tortur zu einem großen Erfolg machen.
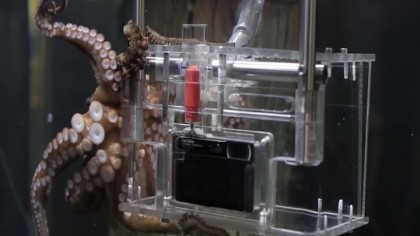
Wo ist der Octo-Bot jetzt? In einem Tank im Livorno-Aquarium in Italien neben einem echten Oktopus.
Als nächstes für die Oktorobotik, a synthetische Form von Kopffüßerhaut das kann sich von einer flachen 2D-Oberfläche in eine dreidimensionale mit Unebenheiten und Gruben verwandeln.
Via : IEEE-Spektrum , Live Science