

Forscher der Harvard John A. Paulson School für Ingenieurwissenschaften und angewandte Wissenschaften SEAS entwickelt haben Ein neuartiger Roboter, der sich von Schlangen inspirieren lässt und ein altes japanisches Papierhandwerk verwendet. Der neue Roboter wird aus Kirigami hergestellt.
VERBINDUNG: 11 ERSTAUNLICHE TIER-INSPIRIERTE ROBOTER
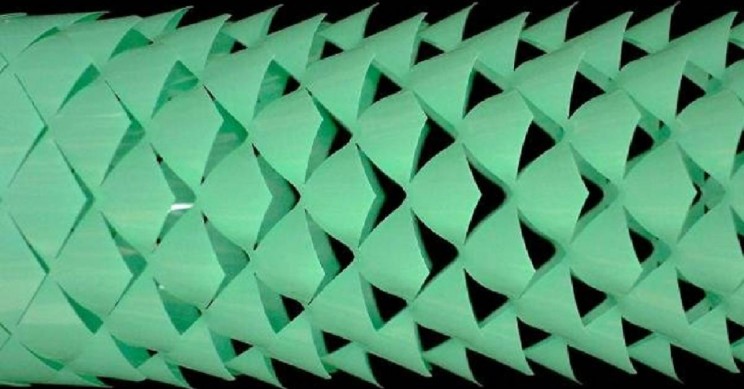
Greift den Boden wie Schlangenhaut
Für die Uneingeweihten ist Kirigami Eine Origami-Variante, die darin besteht, das Papier zu schneiden, anstatt es nur zu falten. Der neu gestaltete Roboter ist eine Verbesserung gegenüber einer ersten Version, bei der ein flaches Kirigami-Blatt verwendet wurde.
Der neue Roboter verfügt über eine 3D-strukturierte Oberfläche, die den Boden wie echtes Schlangenleder erfassen kann. Außerdem verfügt er über eine programmierbare Hülle, die die Geschwindigkeit und Genauigkeit des Roboters verbessert.
"Dies ist ein erstes Beispiel für eine Kirigami-Struktur mit ungleichmäßigen Popup-Deformationen", sagte Ahmad Rafsanjani, Postdoktorand bei SEAS und Erstautor des Papiers.
Diskontinuierliches Popup
"Beim flachen Kirigami ist das Popup kontinuierlich, was bedeutet, dass alles auf einmal angezeigt wird. In der Kirigami-Shell ist das Popup jedoch diskontinuierlich. Diese Art der Steuerung der Formtransformation kann zum Entwerfen ansprechender Oberflächen und intelligenter Skins verwendet werdenmit On-Demand-Änderungen in ihrer Textur und Morphologie. "
Die neue Forschung ermöglichte die Kontrolle von zwei Eigenschaften des Materials: der Größe der Schnitte und der Krümmung des Blattes. Durch die Kombination dieser Merkmale konnten die Forscher die Steuerung lokalisierter Popups programmieren.
"Indem wir Ideen aus phasentransformierenden Materialien entlehnen und sie auf von Kirigami inspirierte Architekturmaterialien anwenden, haben wir gezeigt, dass sowohl geknallte als auch nicht geknallte Phasen gleichzeitig auf dem Zylinder existieren können", sagte Katia Bertoldi, William und Ami Kuan DanoffProfessor für Angewandte Mechanik an der SEAS und leitender Autor der Arbeit.
"Durch einfaches Kombinieren von Schnitten und Krümmung können wir bemerkenswert unterschiedliche Verhaltensweisen programmieren."
Das Endergebnis ist ein Roboter, der wie eine Schlange aussieht und sich verrückt verhält. Jetzt versuchen die Forscher, ein inverses Entwurfsmodell für kompliziertere Verformungen zu entwickeln.
"Die Idee ist, wenn Sie wissen, wie sich die Haut verwandeln soll, können Sie einfach schneiden, rollen und gehen", sagte Lishuai Jin, ein Doktorand bei SEAS und Mitautor des Artikels.
Die Forschung wurde veröffentlicht in Verfahren der Nationalen Akademie der Wissenschaften .