

Der Jumper in einer stabilen Pre-Jump-Konfiguration. Elliot W. Hawkes
Frösche tun es. Wallabies tun es. Sogar gebildete Flöhe tun es.
Jetzt kann ein Roboter sie alle überspringen.
In einem Papier veröffentlicht am Mittwoch im Peer-Review-JournalNatur, Forscher stellen eine relativ einfache Möglichkeit vor, „Springer“ zu quantifizieren und zu vergleichen – eine Kategorie, die beides umfasstLebewesen und technische Maschinen — über alle Skalen hinweg. Aber das ist noch nicht alles.
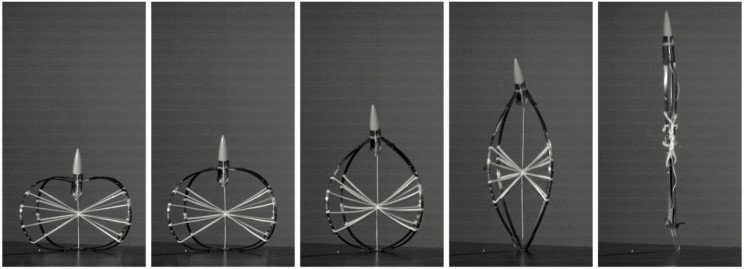
„Aufgrund dieser Erkenntnisse haben wir ein Gerät entwickelt, das über 30 [Meter] hoch springen kann, unseres Wissens weit höher als zuvor konstruierte Springer und um eine Größenordnung höher als die besten biologischen Springer“, schreiben sie.Ihr Springer, der etwas weniger als 30 cm hoch ist und etwas mehr als 30 g wiegt, kann sich mit einer Startgeschwindigkeit von 92 Fuß 92 Fuß 33 m 108 Fuß hoch in die Luft schießen.28 m pro Sekunde.
Sehen Sie es sich hier in Aktion an:
Ein neues Sprungmodell macht bessere Springer möglich
Menschen sind seit langem vom Springen fasziniert, was die Forscher als „Bewegung, die durch Kräfte erzeugt wird, die vom Springer auf den Boden ausgeübt werden, unter Beibehaltung einer konstanten Masse“ definieren. Das schließt Maschinen wie Raketen und Pfeile aus, die von einem Bogen geschossen werden. Aristotelesdiskutierten die Verwendung von Gewichten, um höher zu springen, und Wissenschaftler der Renaissance entwickelten ein rudimentäres Modell zur Analyse des Springens im Tierreich. Seit mehr als einem halben Jahrhundert suchen Ingenieure in der biologischen Welt nach Inspiration in Sprungmaschinen entwerfen.
Das Springen zwingt sowohl Ingenieure als auch die Evolution, einige grundlegende physikalische Einschränkungen der Energieerzeugung zu konfrontieren. "Muskeln und Motoren können nicht die hohe Leistung erzeugen, die erforderlich ist, um ... Springer allein voranzutreiben", Maschinenbauingenieur Sarah Bergbreiter schreibt in einer Perspektive, die zusammen mit dem Artikel in veröffentlicht wurdeNatur. Lebende und technische Systeme umgehen diese Grenze gleichermaßen, indem sie ihre „Muskeln und Motoren verwenden, um Energie in federähnlichen Strukturen zu speichern“, bevor sie die Energie auf einmal in einer Methode freisetzen, die als Riegel-vermittelte Federbetätigung bezeichnet wird, schreibt sie.
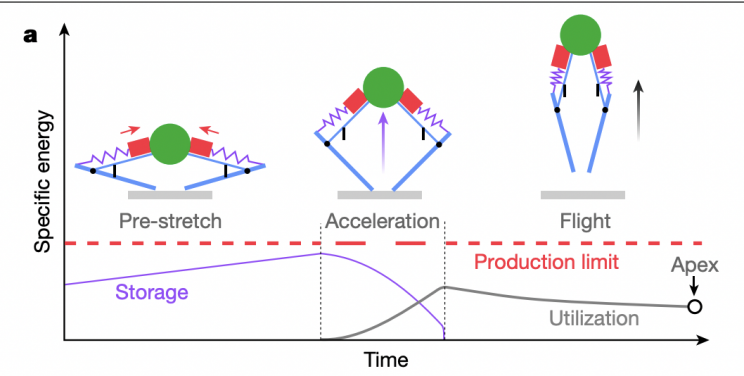
Die Erkenntnisse ermöglichten revolutionäre Designs
Frühere Forscher hatten untersucht, wie einige der produktivsten Springer der Natur wie der winzige Froschzikade, ein Insekt, das das 115-fache seiner Körperlänge springen kann es schaffen, sich so hoch in die Luft zu katapultieren, aber diese Studien wurden durch einige Annahmen eingeschränktneue Studie direkt konfrontiert.Zum Beispiel gibt es einige große Unterschiede zwischen Linearmotoren in Lebewesen z. B. Muskeln und den Motoren, die Ingenieuren zur Verfügung stehen.
„Die Drehmotoren, die üblicherweise in technischen Robotern zu finden sind, können [diese Einschränkungen] überwinden, indem sie als Winde fungieren, um eine Kraft über eine viel größere Verschiebung bereitzustellen, ohne dass ein größerer Motor erforderlich ist, wodurch die Arbeitsdichte erhöht wird“, sagt Bergbreiter. „AsSolange Rotationsmotoren weiterdrehen können, sind technische Systeme stattdessen durch die Energiedichte gespeicherte Energie pro Masse der Federn begrenzt."
Die Forscher erkannten auch, dass eine Mischung aus Gummibändern und Kohlefaserfedern eine enorme Energiemenge pro Masse speichern kann. Im Gegensatz zu den meisten Federn „führt diese Konfiguration auch dazu, dass die Feder eine relativ konstante Druckkraft benötigtüber verschiedene Distanzen angewendet werden", sagt Bergbreiter. Das ist ein großer Vorteil, wenn man versucht, einen rekordverdächtigen Sprungroboter zu bauen. Schließlich half die Modellierungsarbeit den Forschern zu erkennen, dass die typischen Proportionen eines Springers nicht unbedingt optimal sindIhre Erfindung verfügt über Federn, die viel größer sind als der Motor.
"Dieses unerwartet hohe Verhältnis zwischen Feder- und Motormasse ist eine Folge von
die relativen Energiebeschränkungen dieser Komponenten: Die Energiedichte der Feder begrenzt die Sprunghöhe des Roboters, während die Arbeitsdichte der Muskeln die Energiemenge begrenzt, die biologische Springer in ihren Federn speichern können", erklärt Bergbreiter.