

Die NASA wird im Februar 2021 ihren nächsten Rover, Perseverance, auf der Marsoberfläche landen, und ein Ingenieur des Curiosity Rover-Pilotenteams hat gerade erfahren, wie der Prozess abläuft.
Es gibt ungefähr eine 22 Minuten Signalverzögerung zwischen Erde und Mars, was bedeutet, dass das Steuern des Fahrzeugs über unbekanntes Gelände eine einzigartige Planung erfordert. Evan Hilgemann, ein NASA-Ingenieur, der ausgewählt wurde, um dem Team von Ingenieuren zu dienen, die den Curiosity Rover pilotierten, schrieb kürzlich eine mittlerer Beitrag Informationen darüber, wie die Erfahrung war.
Sein Ziel beim Schreiben des Beitrags war nicht nur, seine einzigartige Geschichte zu teilen, sondern auch allen, die Perserverence beim Fahren über den roten Planeten beobachten, einen kleinen Hintergrund darüber zu geben, was sich hinter den Kulissen abspielt.
Das erste, was Hilgemann über die Steuerung des Rovers bemerkt, ist, dass " Neugier erhält nur einmal am Tag Informationen von der Erde und ist den Rest der Zeit für sich allein. "Wie steuert sein Team den Rover überhaupt, wenn er nur einmal am Tag Informationen erhält?
Steuerung des Rovers
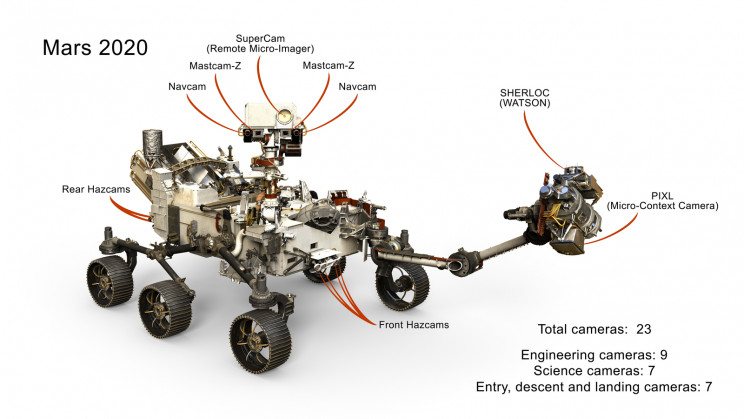
Für den Anfang sind die Rover mit 3D-Kameras abgedeckt, die ein genaues Bild ihrer gesamten Umgebung ermöglichen. Mit den Sensoren an Bord kann der Rover viele Aufgaben autonom erledigen, z. B. das Aufnehmen und Scannen von Steinen mit seinenan Bord eines Lasers oder in vorgeplanten Mustern herumfahren. Der Roboter bleibt jedoch manchmal stecken und hält sich in der Regel fest, bis er weitere Anweisungen vom grünen Planeten erhält.
Die Person, die zu einem bestimmten Zeitpunkt als Rover-Fahrer die Führung übernimmt, ist dafür verantwortlich, den Rover sicher zu halten. Um dieses Ziel erfolgreich zu erreichen, müssen Sie sehen, wohin Sie fahren. Das Ingenieurteam kann ein virtuelles Image entwickelnvon der Umgebung des Rovers mit Navcams und Hazcams. Die Hazcams sind Kameras an Bord, die in der Nähe befindliche Gefahren wie Felsen oder Felsvorsprünge erkennen, und die Navcams konzentrieren sich auf die Umgebung in größerer Entfernung, um die Position zu bestimmen.
Wie für Senden des Rovers seine Anweisungen, sobald die Ingenieure ein klares Bild erhalten, hat das Team einige Optionen. Sie können Informationen im Blindfahrmodus senden. Hilgemann stellt fest, dass "Blindfahren" ist die einfachste verfügbare Form der Navigation. In diesem Modus folgt der Rover den spezifischen Anweisungen, nimmt jedoch keine Anpassungen basierend auf dem tatsächlichen Fortschritt vor. "
Eine andere Methode ist "Visual Odometry", die laut Hilgemann die am häufigsten verwendete Methode ist. Bei dieser Methode nimmt der Rover im Wesentlichen in regelmäßigen Abständen etwa jeden Meter Bilder auf und vergleicht sie dann mit vorherigen Bildern, um zu sehen, wo und wie sie bewegt werdendas Gelände hat sich verändert.
VERBINDUNG: NASA'S PERSEVERANCE ROVER, UM FOSSILIEN MIT RÖNTGENSTRAHLEN ZU JAGEN
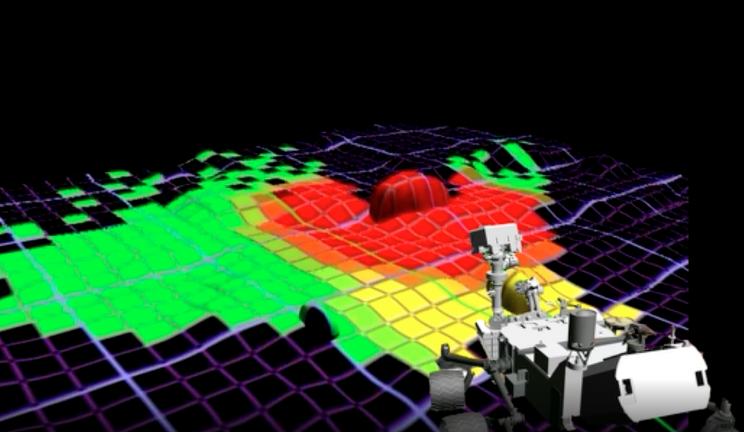
Schließlich heißt das High-Tech-Fahren der Techniken "autonav", bei dem der Rover nur ungefähr abdecken kann " 100 Fuß in einer Stunde. "Dieser Modus ist wie Selbstfahren in Fahrzeugen. Mithilfe der an Bord befindlichen Hazcams und Navcams kann der Rover ein Bild seiner Umgebung entwickeln und sichere Wege autonom abbilden. Das zusammengesetzte Bild, das der Rover entwickelt, sieht ausdas Bild unten, wobei die verschiedenen Farben sicheres grün oder gefährliches rot Gelände anzeigen.
Die nächsten Schritte der Beharrlichkeit
Unter der Annahme, dass im Februar alles nach Plan für Ausdauer verläuft, wird der Rover von seiner Besatzung mit einer der drei von Hilgemann beschriebenen Methoden gesteuert. Es besteht jedoch ein erhebliches Risiko, dass der Rover die Oberfläche nicht erreicht. Der Abstiegund die Landephase der Drohne ist bei weitem die größte Chance für ein katastrophales Versagen in der Mission.
Ein Hinweis, den Hilgemann über den neuen Rover hinzufügt, ist, dass er im Vergleich zu Curiosity eine Art Geschwindigkeitsdämon ist. Er fügt hinzu: "Der neue Rover kann dank neuer dedizierter und besserer Computerressourcen im Allgemeinen mindestens doppelt so schnell fahren wie CuriosityAlgorithmen. Navigationskameras von Perseverance sind auch in Farbe und höherer Auflösung "als Curiosity.
Ausdauer soll auf dem Mars landen 18. Februar 2021.